
Page 24 - 《应用声学》2024年第1期
P. 24
20 2024 年 1 月
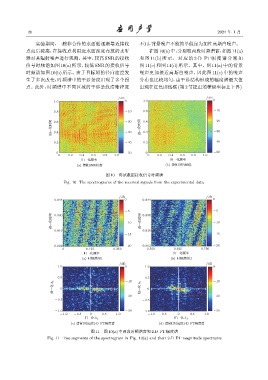
实验期间,一艘非合作的水面船逐渐靠近接收 不同,背景噪声不能简单假定为加性高斯白噪声。
点而后驶离,在接收点利用近水面深度布放的水听 在图10(a)中,分别取两段时频谱窗,如图 11(a)
器对其辐射噪声进行观测。其中,较高 SNR 的接收 和图 11(b) 所示, 对应的 2-D FT 幅度谱分别如
信号时频谱如图 10(a) 所示,较低 SNR 的接收信号 图 11(c) 和图 11(d) 所示。其中,图 11(a) 中的背景
时频谱如图 10(b) 所示。由于目标船的径向速度发 噪声更加接近高斯白噪声,因此图 11(c) 中的噪声
生了多次改变,时频谱中的干涉条纹出现了多个拐 分布也比较均匀,由干涉结构形成的幅度谱最大值
点。此外,时频谱中不同区域的干涉条纹清晰程度 出现在红色虚线框(第2节提出的横纵坐标上下界)
/dB /dB
1.0 0 1.0 0
0.8 -10 0.8 -10
ॆʷӑᫎ 0.6 -20 ॆʷӑᫎ 0.6 -20
-30
0.4
-30
0.4
0.2 -40 0.2 -40
0 -50 0 -50
0 0.2 0.4 0.6 0.8 1.0 0 0.2 0.4 0.6 0.8 1.0
ॆʷӑᮠဋ ॆʷӑᮠဋ
(a) ଌஆSNRᣗᰴ (b) ଌஆSNRᣗͰ
图 10 海试数据接收信号时频谱
Fig. 10 The spectrograms of the received signals from the experimental data
/dB /dB
0.844 0 0.844 0
-5 0.830 -5
ॆʷӑᫎ -10 ॆʷӑᫎ -10
0.830
0.816 0.816
-15 -15
0.802 -20 0.802 -20
0 0.125 0.250 0.500 0.625 0.750
ॆʷӑᮠဋ ॆʷӑᮠဋ
(a) ᮠ៨ቔI (b) ᮠ៨ቔII
/dB /dB
1.0 0 1.0 0
0.5 -10 0.5 -10
ॆʷӑ k t 0 ॆʷӑ k t 0
-20 -20
-0.5 -0.5
-1.0 -30 -1.0 -30
-1.0 -0.5 0 0.5 1.0 -1.0 0.5 0 0.5 1.0
ॆʷӑ k f ॆʷӑ k f
(c) ៨ቔIࠫऄᄊ2-D FTࣨए៨ (d) ៨ቔIIࠫऄᄊ2-D FTࣨए៨
图 11 图 10(a) 中两段时频谱窗和 2-D FT 幅度谱
Fig. 11 Two segments of the spectrogram in Fig. 10(a) and their 2-D FT magnitude spectrums