
Page 57 - 《应用声学》2024年第1期
P. 57
第 43 卷 第 1 期 任露露等: 点云投影结合轻量化卷积神经网络实现三维成像声呐快速目标分类 53
为1×1,卷积过程与标准卷积类似,其通道数与输入 Input Input
一致,完成对深度卷积输出的线性组合,如图9(c)所
示。逐点卷积的运算量为M · N · D F · D F 。 Cov2d1×1, Cov2d1×1,
ReLU6 ReLU6
则深度可分离卷积的计算量与标准卷积计算
Dwise 3×3, Dwise 3×3,
量比值为 ReLU6 ReLU6
1 1
D K ·D K ·M·D F +M·N·D F ·D F
= + 2 . (11) Cov2d1×1, Cov2d1×1,
D K ·D K ·M·N·D F ·D F N D
K Linear Linear
由此可见,当使用 3×3 大小的卷积核时,深度可分
离卷积的计算量可以减小至标准卷积的1/9。 Add
(a) stride=1 (b) stride=2
M 图 10 反向残差网络结构图
...
Fig. 10 Reverse residual network structure diagram
D K
D K N
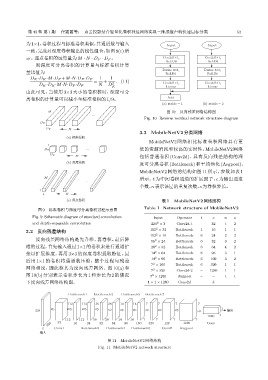
3.3 MobileNetV2分类网络
(a) ಖюԄሥ
MobileNetV2 网络相比标准卷积网络具有更
... 低的资源消耗和较高的实时性,MobileNetV2 网络
D K
D K
M 包括普通卷积 (Conv2d)、具有反向残差结构的深
(b) ງएԄሥ
度可分离卷积 (Bottleneck) 和平均池化 (Avgpool)。
MobileNetV2 网络的结构如图 11 所示,参数如表 1
M 所示。t 为中间卷积通道的扩展因子,c 为输出通道
...
个数,n表示该层的重复次数,s为卷积步长。
N
(c) ᤪགԄሥ 表 1 MobileNetV2 网络结构
图 9 标准卷积与深度可分离卷积过程示意图 Table 1 Network structure of MobileNetV2
Fig. 9 Schematic diagram of standard convolution Input Operator t c n s
and depth-separable convolution 224 × 3 Conv2d-1 – 32 1 2
2
2
3.2 反向残差结构 112 × 32 Bottleneck 1 16 1 1
2
112 × 16 Bottleneck 6 24 2 2
反向残差网络结构是先升维、再卷积、最后降 56 × 24 Bottleneck 6 32 3 2
2
维的过程,首先输入通过 1×1 的卷积来进行通道扩 28 × 32 Bottleneck 6 64 4 2
2
2
张以扩展维度,再用 3×3 的深度卷积提取特征,最 14 × 64 Bottleneck 6 96 3 1
2
后用 1×1 的卷积将通道数压缩,整个过程与残差 14 × 96 Bottleneck 6 160 3 2
2
7 × 160 Bottleneck 6 320 1 1
网络相反,因此称其为反向残差网络。图 10(a) 和
2
7 × 320 Conv2d-2 – 1280 1 1
图 10(b) 分别表示卷积步长为 1 和步长为 2 的情况 7 × 1280 Avgpool – – 1 1
2
下反向残差网络结构图。 1 × 1 × 1280 Conv2d – k – –
Bottleneck1 Bottleneck3 Bottleneck5 Bottleneck7
112 112 56 28 14 14 7 7 7 7
1
224 ᣥѣ
1280 1
112 112 56 28 14 14 7 7 7 7
224 32 16 24 32 64 96 160 320 128 1280 Conv
3 Conv1 Bottleneck2 Bottleneck4 Bottleneck6 Conv2 Avgpool
ᣥ̡
图 11 MobileNetV2 网络结构
Fig. 11 MobileNetV2 network structure