
Page 54 - 《应用声学》2024年第1期
P. 54
50 2024 年 1 月
噪点,需要对声呐图像进行预处理,实现抑制干扰、
x = r sin α,
提升图像质量的目的。三维成像声呐成像结果的预
y = r sin β, (7)
处理包括最大值滤波和阈值滤波这两个步骤,可以
√
2 2
z = r cos α − sin β,
去除大部分的干扰和噪声,而且操作简单,运算量
式(7) 中:r = ct/2,t 为回波到达时间。如图 2 所示, 小,可以实时运行。
通过计算波束域数据中每个散射点的空间位置便
可以将波束域数据转换为原始点云 P,其中原始点 1.2 最大值滤波
云P 中包含 N α × N β × N r 个散射点的位置信息和 三维成像声呐的使用场景包括水下地形测绘、
强度信息。 水中目标探测等,其中感兴趣目标在整个三维成像
空间中表现为若干连续曲面和孤立散射点的集合。
N β
而三维成像声呐波束形成之后的波束域数据维度
N r 是N α × N β × N r ,表示整个三维成像空间中的散射
点的强度分布,其中大部分空间中并不存在目标,其
N α 强度为环境噪声,需要将其去除。由于三维成像声
呐的工作频率为数百千赫兹且工作距离通常不大
于 100 m,其声波穿透射能力弱、声线弯曲效应小,
۳˗ॷ 同时其波长短,远小于感兴趣目标的尺度,在对感兴
图 2 波束形成示意图 趣目标成像时不会发生绕射,同一个波束前方物体
Fig. 2 Schematic diagram of beamforming 会对后方物体造成遮挡。所以对波束域数据按照波
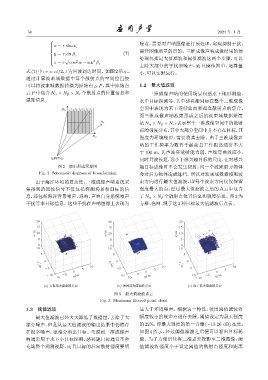
由于海洋环境的复杂性,三维成像声呐系统采 束方向进行最大值滤波,即每个波束方向仅仅保留
集得到的回波信号不仅包括探测场景和目标的信 强度最大的点,经过最大值滤波之后的点云中包含
息,还包括海洋背景噪声、混响、声呐自身系统噪声 了N α × N β 个散射点位置信息和强度信息。图3 为
干扰等非目标信息。这些干扰在声呐图像上表现为 方框、渔网、绳子这3种目标最大值滤波后点云。
20 20 20
15 15 15
z/m 10 z/m 10 z/m 10
5 5 5
0 0 0
10 10 10
5 5 5
0 x/m 0 0
10 10 x/m 10
x/m
-5 5 -5 5 -5 5
0 0 0
-10 -5 y/m -10 -5 y/m -10 -5 y/m
-10 -10 -10
(a) வతܸϙฉག̈ (b) ດᎪతܸϙฉག̈ (c) ፤ߕతܸϙฉག̈
图 3 最大值滤波点云
Fig. 3 Maximum filtered point cloud
1.3 阈值滤波 显大于环境噪声。根据这一特性,使用阈值滤波将
最大值滤波已经大大降低了数据量,去除了大 幅度较小的噪声点进行去除,阈值设定为最大强度
部分噪声,但是从最大值滤波的输出结果中仍然存 的 22%,即最大强度的第一旁瓣 (−13.26 dB) 高度。
在很多噪声,很难分辨出目标。考虑到三维成像声 如图 4 所示,经过阈值滤波之后便可以看出目标轮
呐通常用于水下小目标探测,感兴趣目标通常不会 廓。为了方便后续将三维点云投影至二维图像,阈
充满整个观测视野,而且目标的后向散射强度要明 值滤波将强度小于设定阈值的散射点强度和距离