
Page 59 - 《应用声学》2024年第1期
P. 59
第 43 卷 第 1 期 任露露等: 点云投影结合轻量化卷积神经网络实现三维成像声呐快速目标分类 55
1.0 算机硬件资源的要求较高。ResNet50 的参数量为
45.75 M,相比 VGGNet16减少一半以上,而本文使
0.8
用的 MobileNetV2 模型参数仅为 2.28 M,模型参数
юᆸဋ 0.6 量较小,能够有效应用到各种嵌入式设备中。
4.3 模型计算速度比较
ງएڏ
0.4 ूएڏ 由公式(11)可知,当使用3×3大小的卷积核时,
ᚸՌڏ
深度可分离卷积的计算量可以减小至标准卷积的
0.2
0 20 40 60 80 100 1/9,与计算量相对应的是模型的计算速度。为了进
ᤖ̽
(a) ˀՏᣥКᄊѬዝюᆸဋ 一步衡量本文使用模型在水下目标分类任务中的
1.2 计算速度,分别使用 VGGNet16、ResNet50 与本文
ງएڏ MobileNetV2网络对水下目标图像进行特征提取和
ूएڏ
1.0
ᚸՌڏ 分类,所使用的数据集及参数设置均与 4.2 节实验
͉̽Ѧϙ 0.8 相同,3 种模型的计算速度如表 4 所示。其中,训练
时间是指模型在训练过程中对每张图像耗费的时
0.6
间,测试时间是指模型在测试过程中对每张图像进
行预测所需要的时间。
0.4
0 20 40 60 80 100 表 4 不同模型计算速度
ᤖ̽
(b) ˀՏᣥКᄊ͉̽Ѧ Table 4 Computational speed of different
network models
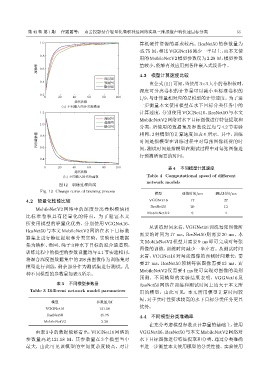
图 12 训练过程曲线
Fig. 12 Change curve of training process
模型 训练时间/ms 测试时间/ms
4.2 轻量化性能比较 VGGNet16 17 27
ResNet50 20 13
MobileNetV2 网络中的深度分离卷积模块相
MobileNetV2 9 4
比标准卷积具有轻量化的特点,为了验证本文
所使用模型的轻量化优势,分别使用 VGGNet16、
从训练时间来看,VGGNet16 训练每张图像所
ResNet50 与本文 MobileNetV2 网络在水下目标数
需要的时间为 17 ms,ResNet50 则需要 20 ms,本
据集上进行特征提取和分类实验。实验使用数据
文 MobileNetV2 模型只需要 9 ms 即可完成对每张
集为铁框、渔网、绳子 3 种水下目标的混合通道图,
图像的训练,训练时间减少一半左右。从测试时间
训练过程中的模型的参数设置均与4.1节实验相同,
来看,VGGNet16 对每张图像的预测时间最长,需
将混合深度图数据集中的 398张图像作为训练集对
要 27 ms,ResNet50 预测每张图像需要 13 ms,而
模型进行训练,剩余部分作为测试集进行测试。几
MobileNetV2 仅需要 4 ms 便可实现对图像的类别
种不同模型的参数量如表3所示。
预测。不同模型的实验结果表明,VGGNet16 及
表 3 不同模型参数量 ResNet50 网络在训练和测试时间上均大于本文所
Table 3 Different network model parameters 用的模型。由此可见,本文所用模型计算时间较
短,对于实时性要求较高的水下目标分类任务更具
模型 参数量/M
优势。
VGGNet16 121.58
ResNet50 45.75
4.4 不同模型分类准确率
MobileNetV2 2.28
在充分考虑模型参数及计算量的基础上,使用
由表 3 中的数据能够看出,VGGNet16 网络的 VGGNet16、ResNet50 与本文 MobileNetV2 网络对
参数量高达 121.58 M,其参数量在 3 个模型当中 水下目标图像进行特征提取和分类,通过分类准确
最大,由此可见该模型的空间复杂度较高,对计 率进一步衡量本文使用模型的分类性能。实验使用