
Page 133 - 《应用声学》2024年第6期
P. 133
第 43 卷 第 6 期 李萌等: 套管井超声弯曲波测井逆时偏移数值实验研究 1309
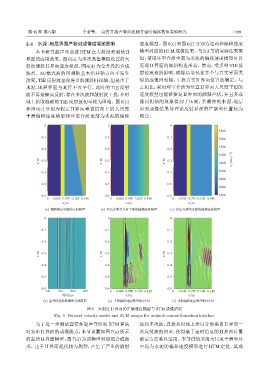
2.4 水泥-地层界面产状对成像结果的影响 速度模型。图 6(e) 和图 6(f) 分别为这两种偏移速度
本节研究超声弯曲波 RTM 在大斜度和起伏 II 模型对应的RTM成像结果。与3.3节的实验结果类
界面的应用效果。图6(a)为本次数值模拟设置的大 似,使用环空介质全部为水泥的偏移速度模型可以
斜度倾斜 II 界面速度模型,图6(d) 为全井段的合成 展现 II 界面的倾斜构造形态。然而,受多种 TIE 反
波形。A0 模式波的同相轴基本沿井轴方向不发生 射波震相的影响,成像结果包含多个与真实界面类
改变,TIE反射波呈现连贯的倾斜同相轴,但是由于 似的成像同相轴,干扰真实 II 界面位置的确定。与
水泥 -地层界面与套管不再平行,此时的 TIE 反射 之相比,采用环空介质为竖直 II 界面大尺度平滑的
波不再是镜面反射,存在多次波和散射波干扰,在时 速度模型也能够恢复 II 界面的倾斜产状,并且多成
域上拾取准确的TIE反射波初至较为困难。图6(b) 像同相轴的现象得到了压制,其最终的水泥 -地层
和图 6(c) 分别为假定 II 界面垂直情况下的大尺度 界面成像结果与理论反射界面的产状和位置较为
平滑偏移速度模型和环空介质全部为水泥的偏移 吻合。
0 0 0
0.1 0.1 0.1
0.2 0.2 0.2
z/m 0.3 z/m 0.3 z/m 0.3 v⊳(mSs -1 )
0.4 0.4 0.4
0.5 0.5 0.5
0.6 0.6 0.6
0 0.035 0.070 0.105 0.140 0 0.035 0.070 0.105 0.140 0 0.035 0.070 0.105 0.140
x/m x/m x/m
(a) Ϛபڡࡏႍ᭧ᄊവی (b) ݓՑ̮᠏ܸࡇएࣱᄊϠረᤴएവی (c) ݓՑ̮᠏˞ඵซᄊϠረᤴएവی
0 0 0
0.1 0.1 0.1
0.2 0.2 0.2
z/m 0.3 z/m 0.3 z/m 0.3
0.4 0.4 0.4
0.5 0.5 0.5
0.6 0.6 0.6
100 150 200 250 0 0.035 0.070 0.105 0.140 0 0.035 0.070 0.105 0.140
ᫎ/ms x/m x/m
(d) Л̌ᤃೝฉ٨ᄊՌੇฉॎ (e) ࣱϠረᤴएവیᄊRTM (f) ඵซϠረᤴएവیᄊRTM
图 6 大斜度 II 界面的正演速度模型与 RTM 成像结果
Fig. 6 Forward velocity model and RTM images for inclined cement-formation interface
为了进一步测试套管井超声弯曲波 RTM 算法 波和多次波,直接从时域上难以分辨来自 II 界面一
对复杂 II 界面的成像能力,本节设置如图 7(a) 所示 次反射波的初至,使得基于走时信息的 II 界面位置
的起伏 II 界面模型,图 7(d) 为该模型对应的合成波 确定方法难以适用。本节仍然采用大尺度平滑和环
形。由于 II 界面起伏较为剧烈,产生了严重的散射 空均为水泥的偏移速度模型进行 RTM 定位,其成