
Page 98 - 《应用声学》2024年第6期
P. 98
1274 2024 年 11 月
因此深海声道中声线向声道轴方向偏折,部分掠射
角较小的声线一直保留在声道轴内,未经界面反射, 2 系统模型
能量损失较小,能够实现较远距离传播,有利于远距
离信息传输。而浅海由于海深较浅,声线在传播过 2.1 S2C抗多径理论分析
程中历经多次界面反射,不利于远距离传播。浅海、 幅度归一化的S2C信号模型 [20] 为
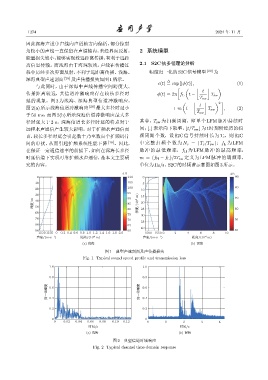
深海典型声速剖面 [25] 及声传播损失如图1所示。 ∆
c(t) = exp [jϕ(t)] , (1)
与此同时,由于深海中声线传播空间跨度大、
[ ( ⌊ ⌋ )
传播距离较远,其信道冲激响应存在较长多径时 ϕ(t) = 2π f L t − t T sw
T sw
延的现象。图 2 为浅海、深海典型信道冲激响应, ( ⌊ ⌋ ) ]
2
t
图 2(a) 所示浅海信道冲激响应 [26] 最大多径时延小 + m t − T sw , (2)
T sw
于 50 ms,而图 2(b) 所示深海信道冲激响应最大多
径时延大于 2 s。深海信道长多径时延的特点对于 其中,T sw 为扫频周期,即单个 LFM 脉冲持续时
远程水声通信产生较大影响。对于扩频水声通信而 间;⌊.⌋ 表示向下取整,⌊t/T sw ⌋ 为 t 时刻所经历的扫
言,较长多径时延会引起数十乃至数百个扩频码片 频周期个数,设 S2C 信号持续时长为 T c ,则 S2C
间的串扰,从而引起扩频系统性能下降 [16] 。因此, 中完整扫频个数为 N c = ⌊T c /T sw ⌋;f L 为 LFM
在保证一定通信速率的前提下,如何在深海长多径 脉冲的最低频率,f H 为 LFM 脉冲的最高频率,
时延信道下实现可靠扩频水声通信,是本文主要研 m = (f H − f L )/2T sw 定义为 LFM 脉冲的调频率,
究的内容。 单位为Hz/s。S2C的时频谱示意图如图3所示。
dB dB
0 110 0 90
10 105 5
20 100 10 80
95
30 90 15 70
ງए/m 40 85 ງए/(10 2 m) 20
50
60 80 25 60
75 30
70
70 50
35
80 65
40
90 60 40
1530 1535 0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 1500 1550 0 2 4 6 8 10
4
4
ܦᤴ/(mSs -1 ) ᡰሏ/(10 m) ܦᤴ/(mSs -1 ) ᡰሏ/(10 m)
(a) ู๒ (b) ງ๒
图 1 典型声速剖面及声传播损失
Fig. 1 Typical sound speed profile and transmission loss
1.0 1.0
0.8 0.8
ॆʷӑࣨए 0.6 ॆʷӑࣨए 0.6
0.4
0.4
0.2 0.2
0 0
0 0.02 0.04 0.06 0.08 0.10 0.12 0 1 2 3 4
ᫎ/s ᫎ/s
(a) ู๒ (b) ງ๒
图 2 典型信道时域响应
Fig. 2 Typical channel time-domain response