
Page 158 - 《应用声学》2025年第1期
P. 158
154 2025 年 1 月
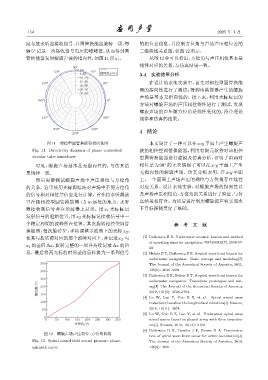
度布放水听器接收信号,让圆管换能器旋转一周,每 的相位差信息,并绘制方位角与声场声压相位差的
隔5 记录一次接收信号电压的峰峰值,从而得到圆 二维曲线关系图,如图12所示。
◦
管换能器发射螺旋声波的指向性,如图11所示。 从图12中可以看出,方位角与声压相位基本是
线性对应的关系,与仿真结果一致。
90°
0 dB
120° 60°
-5 dB ૉՔভ(dB) 3.4 实验结果分析
-10 dB
-15 dB
150° 30° 在设计的水池实验中,首先对相控型圆管换能
-20 dB
-25 dB 器的指向性进行了测试,得到该换能器产生的螺旋
-30 dB
声场是基本无指向性的。接下来,利用光标标记的
180° 0°
方法对螺旋声场的声压相位特性进行了测试,发现
螺旋声场的声压随方位角是线性变化的,符合理论
规律和仿真的结果。
210° 330°
240° 300° 4 结论
270°
图 11 相控型圆管换能器指向性图 本文设计了一种可以在 x-y 平面上产生螺旋声
Fig. 11 Directivity diagram of phase controlled 波的相控型圆管换能器,利用有限元软件对该相控
circular tube transducer 型圆管换能器进行建模及仿真分析,证明了由两对
◦
可见,螺旋声场基本是无指向性的,与仿真结 相位差为 90 的正交偶极子可以在 x-y 平面上产生
果规律一致。 无指向性的螺旋声场。仿真分析表明,在 x-y 平面
然后需要测试螺旋声场中声压相位与方位角 上,一个圆周上声场声压的相位与方位角存在线性
的关系。这里使用光标跟踪法对声场中不同方位角 对应关系。设计水池实验,对螺旋声场的指向性以
的信号相对相位差信息进行计算。首先将水听器放 及声场声压相位角-方位角的关系进行了验证,与仿
置在距相控型圆管换能器 1.5 m 远处的地方,水听 真结果相符合。为以后进行利用螺旋波声呐实现水
器接收到信号并在示波器上显示。用 x 1 光标标记 下目标探测奠定了基础。
发射信号的起始位置,用x 2 光标标记接收信号中一
个稳定周期的波峰所在位置。其次旋转相控型圆管 参 考 文 献
换能器,每次旋转 5 ,手动调整示波器上的光标 x 2 ,
◦
使其与旋转前对应的那个波峰对应上,并记录x 2 与 [1] Dzikowicz B R. Underwater acoustic beacon and method
of operating same for navigation: US7406001[P]. 2008-07-
x 1 的差值∆x,旋转完整的一周并持续记录∆x的信
29.
息。最后将两光标的时间差信息转换为一系列信号 [2] Hefner B T, Dzikowicz B R. A spiral wave front beacon for
underwater navigation: Basic concept and modeling[J].
350 The Journal of the Acoustical Society of America, 2011,
129(6): 3630–3639.
300
[3] Dzikowicz B R, Hefner B T. A spiral wave front beacon for
250 underwater navigation: Transducer prototypes and test-
ᄱͯᝈ/ ° 200 ing[J]. The Journal of the Acoustical Society of America,
2012, 131(5): 3748–3754.
150
[4] Lu W, Lan Y, Guo R Z, et al. Spiral sound wave
100 transducer based on the longitudinal vibration[J]. Sensors,
2018, 18(11): 3674.
50
[5] Lu W, Guo R Z, Lan Y, et al. Underwater spiral wave
0
0 50 100 150 200 250 300 350 sound source based on phased array with three transduc-
வͯᝈ/ ° ers[J]. Sensors, 2019, 19(14): 3192.
[6] Dzikowicz B R, Tressler J F, Brown D A. Demonstra-
图 12 螺旋声场声压相位 -方位角曲线
tion of spiral wave front sonar for active localization[J].
Fig. 12 Spiral sound field sound pressure phase- The Journal of the Acoustical Society of America, 2019,
azimuth curve 146(6): 4821.