
Page 163 - 《应用声学》2025年第1期
P. 163
第 44 卷 第 1 期 袁博等: 信号分离在深海定位中的应用 159
总共训练了300个训练轮次(epoch),初始学习
3 验证
−3
率为 1 × 10 ,如果连续 10个验证集阶段精度没有
提高,则学习率减半。优化器选择Adam。
使用实测的海试数据对分离效果进行验证。实
训 练 目 标 是 短 时 傅 里 叶 变 换 (Short time
验通过船舶拖曳换能器发射 CW 信号,声源在水
Fourier transform, STFT)损失,输入预测波形序列
下 50 m 位置。发射信号频率为 105 Hz、126 Hz、
与真实波形序列通过不同的STFT损失计算多重分
160 Hz、189 Hz 的 CW 信号。接收阵采用坐底阵布
辨率损失。STFT 损失分为两个部分,分别为频谱
放,使用 32 阵元垂直阵。发射声源在距离接收阵
收敛损失(sc)和对数幅度谱损失(mag):
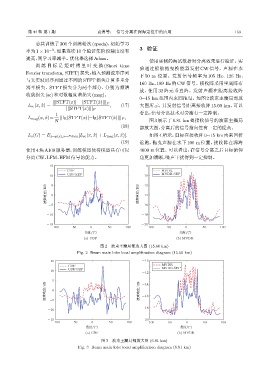
0∼15 km 范围内来回拖曳。如图 2 波束主瓣局部放
|||STFT(x)| − |STFT(ˆx)||| F
L sc (x, ˆx) = , (17) 大图所示,其发射信号距离接收阵 15.60 km,可以
|||STFT(x)||| F
1 看出,信号分离技术对旁瓣有一定抑制。
L mag (x, ˆx)= || lg |STFT(x)|−lg |STFT(ˆx)||| F ,
N 图 3 展示了 6.81 km 处接收信号的波束主瓣局
(18) 部放大图,分离后的信号指向性有一定的提高。
L s (G) = E z∼p(z),x∼P data [L sc (x, ˆx) + L mag (x, ˆx)]. 如图 4 所示,目标在接收阵 0∼15 km 内来回折
(19) 返跑,拖曳声源在水下 100 m 位置,接收阵在深海
使用 4块A100服务器,训练模型使得模型具有可以 4000 m 位置。可以看出,在信号分离之后目标俯仰
分离CW、LFM、HFM信号的能力。 角更加清晰,噪声干扰得到一定抑制。
15 -8
CBF MVDR
CBF-SEP MVDR-SEP
10 -10
ฉౌ־ऄ/DB 5 0 ฉౌ־ऄ/DB -12
-14
-5 -16
-10 -18
-15 -20
-100 -50 0 50 100 -100 -50 0 50 100
ᝈए/(O) ᝈए/(O)
(a) CBF (b) MVDR
图 2 波束主瓣局部放大图 (15.60 km)
Fig. 2 Beam main lobe local amplification diagram (15.60 km)
15 -10
MVDR
CBF
CBF-SEP MVDR-SEP
10
-12
5 -14
ฉౌ־ऄ/dB 0 ฉౌ־ऄ/dB -16
-5
-18
-10
-15 -20
-100 -50 0 50 100 -100 -50 0 50 100
ᝈए/(O) ᝈए/(O)
(a) CBF (b) MVDR
图 3 波束主瓣局部放大图 (6.81 km)
Fig. 3 Beam main lobe local amplification diagram (6.81 km)