
Page 48 - 《应用声学》2025年第1期
P. 48
44 2025 年 1 月
影区的声波到达俯仰角较大,但受限于水平阵 纹通常由波导不变量(β)分布描述,β 分布在影区接
的圆锥角模糊特性,当声源方位偏离基阵正横方向 近 1,干涉条纹斜率较小;而 β 分布在会聚区趋近无
时,测向结果存在显著偏差。为了修正水平阵测向 穷大,干涉条纹斜率明显大于影区 [123−124] 。对于给
偏差,一种方法是改变基阵航向角,利用转向前后两 定频率,距离维声场强度与相邻两阶会聚模态之间
次舷角测量结果,解算声源方位角/俯仰角;另一种 的水平波数差有关,可由三个标量参数近似描述,分
方法是先利用波束输出信号估计声源距离,再将距 别表征会聚区跨度、会聚区宽度以及会聚区侧倾程
离值换算为到达俯仰角 (或相速度),进而得到真实 度 [125] 。上述声场特征可为会聚区声源判定提供理
方位 [59] 。 论依据,需进一步研究声场特征参数的提取方法,并
当前,声影区的定位方法主要针对第一影区。 利用实际海试数据进行验证。
相邻号声影区具有相似的多途到达结构和多途干
80 100
涉结构,理论上,适用于第一影区的定位方法可沿用
至第二影区,但影区号数判别方法有待研究。此外, 60 90
针对声影区的信号检测与估计方法较少。考虑到影 ᮠဋ/Hz 47.9 Hz ͜୧૯ܿ/dB
区干涉结构随接收深度变化显著,对于垂直小孔径 40 80
基阵,平面波波束形成可能造成基阵处理增益下降,
20
需要深入研究深度维干涉结构与阵增益补偿方法, 70
40 50 60 70 80
频移补偿、条纹基波束形成等方法都是可以考虑的 ᡰሏ/km
技术途径。除了借助海底反射声波之外,研究表面 (a) ܦູງए50 m
波导及其泄露效应形成的声场特征,也是影区声源 80 100
探测定位技术的发展思路。
60 90
4.3 会聚区定位方法 ᮠဋ/Hz ͜୧૯ܿ/dB
会聚区传播是深海环境特有的现象,声波经由 40 28.6 Hz 80
水体折射反转,在海面附近聚焦形成高声强区域。
20
得益于聚焦增益,会聚区的声传播损失较球面扩展 70
40 50 60 70 80
损失低20 dB左右,十分利于远程声传播,是移动水
ᡰሏ/km
平阵远程探测的重要区域 [117] 。 (b) ܦູງए80 m
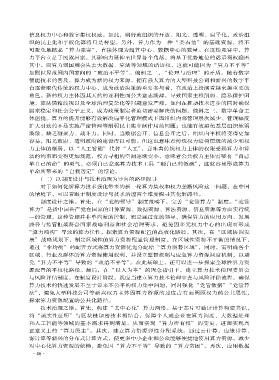
会聚区的空间分布与声源深度密切相关。当声 图 9 会聚区甚低频声场的水平偏移特性 [119] (接收深
源和基阵均位于海面附近时,会聚区宽度较窄;随着 度固定为 20 m,声源深度由 50 m 增大至 80 m,临界频
收发深度逐渐增大,单号会聚区将分裂为内半会聚 率由 47.9 Hz 减小至 28.6 Hz)
区和外半会聚区,且内半会聚区距离逐渐减小,外 Fig. 9 Horizontal migration characteristics of conver-
半会聚区距离逐渐增大 [118] 。甚低频声场中,会聚 gence zone [119] (Receiver depth is fixed at 20 m. As
source depth increases from 50 m to 80 m, the critical
区的水平偏移特性也与声源深度有关。完全深海声
frequency decreases from 47.9 Hz to 28.6 Hz)
道存在一个临界频率,当声源频率低于临界频率时,
随着频率进一步降低,会聚区形成的距离逐渐减小, 会聚区宽度、接收信号强度、干涉条纹等特征
即会聚区出现水平偏移现象,如图 9 所示。值得注 可用作声源运动态势判定。当声源穿越某一号会聚
意的是,上述临界频率还与声源深度有关,因此,结 区时,在会聚区的前沿/后沿处,接收信号会显著增
合声源频率与会聚区的水平偏移量,可估计声源深 强/减弱,据此可判定声源进入/离开会聚区。在此
度 [119−120] 。以上空间分布规律可为会聚区的声源 基础上,假设声源在会聚区宽度内保持匀速直线运
深度判别提供理论依据,但公开文献中有关算法研 动,测量声源穿越该号会聚区的方位、时间,并由声
究较少 [121−122] 。 场模型预报会聚区距离及宽度,可根据几何三角关
会聚区与非会聚区之间的声场差异可用作会 系解算声源航向和航速 [126] ;假设声源在会聚区跨
聚区声源的判定依据。声场的频率 -距离维干涉条 度内保持匀速直线运动,待声源穿越另一号会聚区,