
Page 46 - 《应用声学》2025年第1期
P. 46
42 2025 年 1 月
声源激发的声场强度在频率 -距离维呈现单一类型 只需较小的垂直接收孔径,比较适用于垂直小孔径
的干涉条纹,其频率干涉周期为多途到达时延差的 的移动水平阵,正被研究人员逐渐推广至声影区定
倒数,通常可采用 LOFAR(Low frequency analysis 位问题 [97] 。
and recording) 谱干涉条纹检测方法,提取上述频 当前,直达声区定位方法研究主要针对可靠声
率干涉周期,并结合俯仰角测量值,联合估计声源距 路径为代表的“上发下收”场景。而移动水平阵定位
离-深度 [80,86−90] 。窄带声源激发的声场强度则会形 可能存在 “下发上收” 场景,直达波由下向上、海面
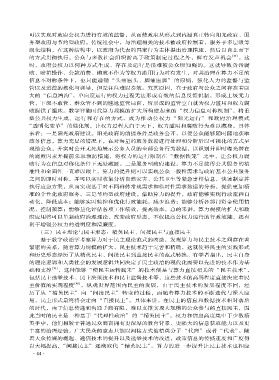
成明暗交替的线谱,若声源深度保持不变,线谱能量 反射波由上向下到达基阵,此时多途到达结构与声
在声线到达俯仰角的正弦 (sin ϕ) 维度上具有恒定 影区相似,在被动定位中可能造成声场区域混淆,有
的干涉周期,该周期与声源深度成反比,如图7所示; 待进一步研究。
对于运动声源,若基阵具备俯仰角分辨能力,将目标
4.2 声影区定位方法
波束能量投影至 sinϕ 域或垂直波数 (k z ≡ k · sin ϕ)
声影区也称为 “海底反射声区”,即海底反射声
域,可通过 Fourier 变换提取线谱干涉周期,进而解
波对该区域声场能量起主要贡献;此外,部分声能量
算声源深度 [91−94] 。若基阵缺少俯仰角分辨能力,
可通过衍射、海面散射及表面波导泄露等方式进入
则需利用干涉结构随时间及接收深度变化的信息
声影区,但上述过程受环境因素影响较大,且相比海
实现声源定位。对于运动声源,线谱能量随时间振
底反射声的能量较少,现有的声影区定位方法主要
荡(振荡周期不恒定,与声源距离和径向速度有关),
借助海底反射声波 [98−100] 。当声源、基阵的深度位
利用垂向多阵元 (垂向多条水平阵) 观测相邻干涉
于几百米以浅时,第一影区覆盖了几千米至几十千
相消 (相长) 条纹出现的时间间隔,可解算直达声线
米的水平距离范围,是中近程定位的主要区域。
与海面反射声线到达基阵的夹角,从而联合估计声
第一影区中,经一次海底反射的声波对声场起
源距离 -深度 [95−96] 。此类方法也称 “声线分离”,最
主要贡献,其多途到达结构可用于定位。与直达声
少需要两个垂向阵元 (两条垂直安装的水平阵),以
区的多途特性类似,到达俯仰角对声源距离变化
测量干涉条纹沿接收深度的变化情况;且由于干
敏感、对声源深度变化宽容,可用于测距;有别于
涉条纹对接收深度变化十分敏感,声线分离方法
直达声区的是,到达俯仰角存在正/负两组 (分别对
应从海面/海底方向到达的声传播路径),需要基阵
ᑟ᧚/dB
1.0
40 的垂直孔径足以分辨两组俯仰角,才能解算声源距
^
^
0.8 sinθ s(t) sinθ s(t) 离 [101−102] 。移动水平阵的垂直孔径通常较小,垂向
35
波束形成分辨能力较弱,可通过垂直双阵元接收信
0.6 30
sinθ 号 (垂直双水平阵波束输出信号) 互相关函数,提取
0.4 25
正/负俯仰角对应的两组到达时延差;考虑到互相
20
0.2 关的时延分辨能力与信号带宽成正比,当信号带宽
15
0 较窄时,可由频谱搬移、反卷积等方法提升带宽利
10 20 30 10 20 30
用率和时延分辨能力 [103−104] 。除俯仰角信息外,多
ᫎ/min ᫎ/min
(a) ܦູງए1 m (b) ܦູງए50 m 途到达时延差也可用于声源定位。影区中,4条本征
图 7 直达声区的窄带声场强度 (150 Hz 频点) 在到 声线形成 6 组到达时延差,其中 2 组时延差与水平
达俯仰角正弦 (图中表示为 sinθ) 维度上具有恒定干 距离和接收深度有关,可用于测距;另外 2组与水平
涉周期,实线和虚线对应不同声源深度的目标跟踪 距离和声源深度有关,可用于测深 [4,105] 。当收发深
轨迹 [93]
度较大、信号带宽较宽时,提取上述 4 组时延差,便
Fig. 7 Narrowband sound intensity (at 150 Hz)
可唯一确定声源位置;而收发深度较小、信号带宽
in the direct arrival zone shows a constant inter-
较窄时,受时延分辨率限制,4 组时延差将重合为两
ference period along sinusoidal dimension of the
组,可能造成声源定位双解问题,分别对应 “上发下
arrival pitch angle (denoted by sinθ). Solid and
dashed lines show the target track with different 收”“下发上收” 两种假设情况 [106−107] ,可尝试利用
source depths [93] 时延差随接收深度的变化关系,消除假目标。