
Page 41 - 《应用声学》2025年第1期
P. 41
第 44 卷 第 1 期 刘与涵等: 深海移动水平阵声源被动定位方法研究进展 37
methods, matched-field processing methods, deep-ocean environmentally adapted methods based on multipath
propagation characteristics, and machine learning methods. Future development trends and promising research
ideas are also discussed.
Keywords: Deep ocean; Horizontal array; Source localization; Passive localization
反射模式;较小出射角范围内的声线则被陷获在水
0 引言
体中,并在海面附近形成高声强的焦散区域,称为会
3
2
聚区,如图 3 所示 [4−5] 。图中,A A 、A A 、A A 3′
1
2′
1′
深海声学研究是开发深海国土资源、建设水下
分别为第一、第二、第三会聚区;在会聚区之间,直达
安全体系、维护国家海洋权益的重要技术手段,在国
家海洋发展战略中具有重要地位。移动平台在深海 声线与反转声线无法抵达的区域称为声影区,C 1 、
环境作业时,常利用其壳体安装或拖曳的水听器阵 C 2 和C 3 则分别表示第一、第二、第三影区。
列对外部声信号进行目标观测和海洋信息获取,发 ܦᤴ/(mSs -1 )
现感兴趣的目标,然后估计其方位、距离、深度等位 1460 1500 1540
0
置参数。因此,需要研究有效且实用的深海声源定 ᛫᭧ฉ ຉՌࡏ
ܦᤴҖ᭧
位方法,以满足移动平台水声装备发展的迫切需求。 ພᡤࡏ
过往的综述文章主要讨论了基于单阵元、水平 1000 ງ๒ܦ᥋ᣉ
拖线阵以及潜标垂直阵的深海声源被动定位方法
研究进展 [1−3] 。水平阵在移动平台上具有较好的适 ງए/m 2000
装性,例如,水平三元子阵、垂直双水平阵等组合基
阵能够获取声场信息随空间分布的变化情况,共形
3000 ພࡏ
阵、多条水平阵等立体基阵具备二维波束形成能力,
有效利用这些基阵形态,可为声源定位方法融入更
多的观测信息维度。
本文旨在梳理深海声源被动定位方法的研究 [4]
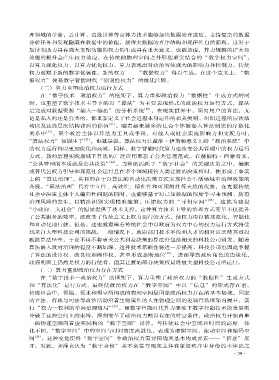
图 1 深海典型声速剖面
成果,分析各类定位方法对于移动水平阵的适用性, [4]
Fig. 1 Typical sound velocity profile in deep ocean
为深海水声装备的发展提供思路。
᛫᭧ฉʾႍ
1 深海环境与声传播特性 ᛫᭧ฉ ͘ᐑӝ
图 1 给出了深海环境的典型声速剖面,由浅至 ງ๒ܦ᥋ᣉ
深可分为表面混合层、温度跃变层和深水等温层。
᛫᭧ฉ᭛
这种海水分层现象可形成 5 种声传播模式,如图 2
所示,分别为表面波导、表面波导泄漏、可靠声路径、
会聚区以及海底反射模式。 ๒अԦ࠱ηՂ
冬季的混合层温度比较均匀,受海水静压力作
˚ႍງए
用形成声速正梯度,声线向海面偏折,并被海面边 ງए᧚ Ի᭥ܦय़
界截留在海水表层,形成表面波导。表面波导可实 ๒अ
现远距离声传播,但这种传播模式随季节、昼夜和
空间变化强烈,部分低频声能量还会向海底方向泄 图 2 深海声传播路径示意图 [4]
露。当声源位于近水面深度、基阵位于临界深度以 Fig. 2 Schematic diagram of sound propagation
paths in deep ocean [4]
下时,声源与基阵之间的直达声线可覆盖 5∼8 倍海
深的水平距离范围,形成可靠声路径。当声源、基阵 对于移动水平阵应用场景,不同的声源位置可
均位于近水面深度时,直达声线只能传播几千米远, 能伴随截然不同的声传播模式,基阵探测定位性能
随后向海底偏折,经海底反射照亮声影区,形成海底 随之剧烈变化。考虑 5000 m 深海环境,声源、基阵