
Page 42 - 《应用声学》2025年第1期
P. 42
38 2025 年 1 月
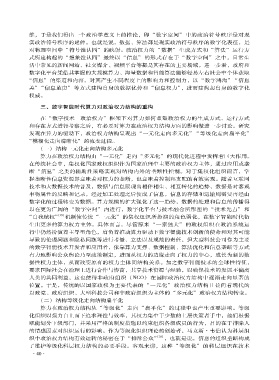
均位于 200 m 深度,声源辐射 100∼150 Hz 宽带信 以上声传播特性表明,单一的定位方法难以满
号,声传播损失在 3∼200 km 距离范围的变化情况 足深海移动水平阵的应用需求。对于适配浅海环境
如图4 虚线所示,随着距离逐渐增大,声源穿越直达 的定位方法,需要研究其在深海环境下的适用性;还
区、声影区、会聚区,声传播损失 (实际中对应接收 需要针对不同的深海声场区域,研究与声传播模式
信噪比) 的动态范围可达 40 dB 以上。此外,在直达 相适配的定位方法。文中将深海声源被动定位方法
区和会聚区内,对声场起主要贡献的声线掠射角较 主要分为传统几何定位方法、匹配场处理 (Matched
小,而主导影区声场的声线掠射角较大,致使移动水 field processing, MFP) 方法、深海环境适配方法和
平阵的测向误差也随距离呈周期性变化。考虑相对 机器学习类方法,简要概述了上述方法的研究进展。
孔径 (绝对孔径除以声波波长) 为 30 的水平线列阵,
当声源位于基阵端射方向时,测向误差随水平距离 2 传统几何定位方法
变化情况如图 4 实线所示,可见测向误差随距离周
2.1 三元阵被动定位方法
期性变化,其变化规律与传播损失的变化规律成正
三元阵被动定位方法通过水平分布的三个子
相关 [6−7] 。
阵接收声源辐射信号,采用平面波传播模型和较高
的工作频率,估计每个子阵的信号到达方向和子阵
A A ϕ A A ϕ A A ϕ
500
间的到达时延差,利用双曲线交汇原理,解算声源的
1000
方位和距离。该方法的测距误差与声源位置、时延
1500 C C C [8]
估计误差、阵形误差、基阵水平孔径等因素有关 。
ງए/m 2000 其中,有效的时延估计是实现定位的基础,通常采用
[9−10]
,结
广义互相关方法估计子阵间的两组时延差
2500
3000 合三元相关方法可进一步提高时延估计精度和检
3500 测概率 [11] ;对窄带信号,可利用广义倒谱相关等方
4000 法提高时延估计精度 [12] 。
0 20 40 60 80 100 120 140 160 180
ᡰሏ/km 传统布阵方式要求三个子阵的中心位置沿直
线等间距分布,不利于基阵安装平台设计;为解决
图 3 深海波导中的反转声线传播路径 [4]
布阵问题,有关学者研究了针对非等间距、非直线
Fig. 3 Propagation paths of the reserved acoustic
三元阵以及任意形状声压 -矢量水听器组合阵等不
rays in deep-ocean waveguide [4]
同阵形的定位方法 [13−16] 。三元阵定位结果对基阵
15 70 安装平台的摇晃以及阵形测量误差十分敏感,且定
位精度受水平孔径限制,通常仅适用于水平大孔径
80
13
刚性基阵。对于有限的时延估计能力和基阵水平孔
வͯͥᝠឨࣀ/(O) 11 100 ͜୧૯ܿ/dB 精度越高,因此三元阵比较适合对中近程快速移动
90
径,声源距离越近,波阵面的曲率变化越显著,测距
声源进行定位;而在百米级以内的距离范围,测距结
9
110
果存在较大近似误差,可采用球面波传播模型和改
7
120 进的距离计算公式,以提高近场定位精度 [17] 。
以上定位方法都是基于方位 -距离平面内的二
5 130
0 40 80 120 160 200
维几何模型,对于水平距离与海水深度处于同一数
ᡰሏ/km
量级的近程声场,声线传播的物理图像比较清晰简
图 4 传播损失及水平线列阵方位估计误差随距离
单,可实现三维被动定位。在三元水平阵的基础上,
的变化 [6]
增加一个垂向阵元 (或利用海面反射形成的虚拟阵
Fig. 4 Transmission loss and bearing estima-
tion errors of a horizontal line array varying with 元) 估计多途时延差,可解算声源深度 [18−19] 。此
range [6] 外,在深海直达声区中,由于声源距离和深度具有