
Page 43 - 《应用声学》2025年第1期
P. 43
第 44 卷 第 1 期 刘与涵等: 深海移动水平阵声源被动定位方法研究进展 39
耦合关系,单阵元定位结果会在距离和深度上呈现 导向矢量计算,而后利用聚焦波束进行测距;对于水
一条模糊曲线,结合三元阵定位结果可消除定位模 平阵,可尝试结合其他声场特征量,对测距偏差进行
糊 [20] 。 修正。
总体而言,三元阵利用较高工作频率和声波的
S ϕ
几何扩展关系实现中近距离声源定位,无需精确的
环境参数作为先验信息。目前,该方法的研究主要 O R ic ϕ y
集中于时延差准确估计和阵元布放。但是,在海底 ๒᭧
x ᐑཥੳଡག C D
反射声传播模式下,三元阵定位结果会出现较大偏 z
S
差;在信噪比较低以及存在多途的情况下,相关函数 z S ϕ
会出现多峰值,造成时延差难以有效提取,这些问题 S
H ᐑཥੳଡӝ۫
都有待进一步研究。 R ic ᄬಖ
2.2 聚焦波束形成方法 ๒अ
y
聚焦波束形成方法是一种基于球面波传播模 z
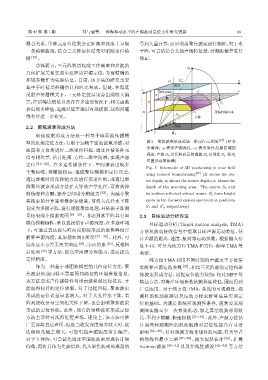
型的近场定位方法,有别于远场平面波波束形成,对 图 5 聚焦波束形成近场三维定位示意图 [27] (H 表
距离和方位角进行二维聚焦扫描,通过补偿各阵元 示海深,z 0 表示声源深度,z 1 表示聚焦扫描区域的
′ ′
信号相位差,估计距离 -方位二维空间谱,实现声源 深度,声源 S 0 及其海面反射虚源 S 0 分别在 S 1 和 S 1
位置形成聚焦峰)
定位 [21−22] 。在多途传播条件下,空间谱会出现多
Fig. 5 Schematic of 3D positioning in near field
个聚焦峰,旁瓣级较高,造成聚焦模糊和定位误差; using focused beamforming [27] (H shows the wa-
通过虚拟时间反转镜方法进行信道匹配,或通过虚 ter depth; z 0 shows the source depth; z 1 shows the
阵聚焦波束形成方法扩大等效声学孔径,可有效抑 depth of the scanning area. The source S 0 and
制伪峰和旁瓣,提升空间谱分辨能力 [23] 。为减小聚 its surface-reflected virtual source S 0 form bright
′
焦搜索的计算量和数据存储量,可将大孔径水平阵 spots in the focused spatial spectrum at positions
′
划分为多级子阵,进行逐级聚焦处理,并依据子阵测 S 1 and S 1 , respectively)
量结果缩小搜索范围 [24−26] 。考虑到水平阵具有圆 2.3 目标运动分析方法
锥角模糊特性,难以直接估计声源深度,在多途环境 目标运动分析(Target motion analysis, TMA)
下,可通过直达波与海面反射波形成的聚焦峰位置 方法从被动接收信号中提取目标声源运动特征,估
解算声源深度,其原理如图 5 所示 [27−28] 。此外,可 计声源的距离、速度、航向等运动参数。根据输入信
结合最小方差无失真响应 [29] 、零点约束 [30] 、反卷积 息不同,可分为纯方位 TMA 和方位 -频率 TMA 等
后处理 [31] 等方法,提高空间谱分辨能力,进而提高 类型。
定位精度。 纯方位 TMA 利用不同时刻的声源水平方位信
作为一种基于球面波模型的几何定位方法,聚 息解算声源运动参数 [32] ,相比三元阵被动定位和聚
焦波束形成同样不需要预知确切的环境参数信息。 焦波束形成方法,远程定位能力较强;相比 MFP 等
该方法要求声传播特性与球面波模型比较接近,才 模基方法,对海洋环境参数依赖程度较低,因而得到
能取得较好的定位效果。对于远程目标,聚焦波束 广泛应用。对于纯方位 TMA,系统的可观测性、观
形成的定位误差显著增大。对于大孔径水平阵,若 测阵的机动航路以及运动方程求解算法是实现定
阵列接收信号空间相关性下降,也会影响聚焦波束 位的基础。为满足系统可观测性条件,通常要求观
形成的定位性能。此外,现有的聚焦波束形成定位 测阵实施至少一次有效机动,加之算法收敛时间较
方法主要针对浅海近程声场。理论上,该方法可推 长,不利于隐蔽、快速探测 [33−34] 。此外,声源方位估
广至深海直达声区,但是当收发深度相差较大时,波 计误差和观测阵的机动航路对定位性能具有显著
达俯仰角随之增大,可能引起声源距离估计偏差。 影响 [35−36] 。针对观测方程非线性的问题,有关学者
对于立体阵,可尝试先通过平面波波束形成估计俯 将伪线性最小二乘 [37−38] 、极大似然估计 [32] 、扩展
仰角,再将其作为先验信息,代入聚焦波束形成器的 Kalman 滤波 [39−41] 以及非线性滤波 [42−43] 等方法