
Page 50 - 《应用声学》2025年第1期
P. 50
46 2025 年 1 月
底反射路径的到达俯仰角,进而估计声源距离 [139] 。 局限在于,只能对声源深度进行二分类,而声源深度
在多目标情况下,方位谱分裂现象可能造成目标判 判决门限与声道轴深度有关,考虑到中低纬地区的
定混淆,可尝试在方位跟踪算法中增加约束条件,对 声道轴通常位于1000 m以深,其适用性有待进一步
海底反射路径形成的假目标进行动态辨识。 验证。
ିਈ/dB 0.07
0
-54
0.06
10 -58
0.05
ᫎ/min 20 -62 ܳणࣀ/s 0.04
0.03
-66
30
-70 0.02 ᄰܦӝS0B0ˁS1B0ܦጳ
ኄʷॖӝB1S1ˁS2B1ܦጳ
ਫ਼ଢНरᝠካፇ౧
0.01
40 -74
0 40 80 120 160
0
ฉౌᝈए/(°) 10 20 30 40 50 60 70 80
҂ο̈́ᝈ/(°)
图 11 直达声区的水平阵方位 -时间历程图 [139] (黑
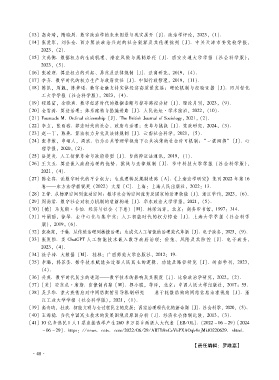
图 12 多途时延差 (频率干涉周期的倒数) 与到达
色曲线表示声源真实方位,与直达路径形成的方位
俯仰角的关系曲线 [141] 。当声源深度一定时,上述关
谱峰基本吻合,海底反射路径形成的方位谱峰偏向
系曲线在直达声区 (圆圈) 和第一影区 (方框) 基本
基阵正横方位)
一致,并与理论值 (虚线) 相吻合
Fig. 11 Bearing-time record using a horizontal ar-
Fig. 12 Multipath delay (reciprocal of frequency
ray in direct arrival zone [139] (Black curve shows
period) versus arrival pitch angle [141] . When
the true bearing of the source, which basically co-
the source depth is constant, the above relation-
incides with the spectrum peak formed by direct
ship curve is basically the same in direct arrival
path. The spectrum peak forming by bottom-
zone (circle marks) and the first shadow zone
reflected path is bias to broadside of the array)
(box marks), and coincides with theoretical value
目前,跨区域的声源测距方法较少,尤其是会 (dashed line)
聚区号数/影区号数估计问题尚无有效的解决途径,
综上所述,基于多途传播特性的深海环境适配
而跨区域的声源测深问题已经取得一定研究进展。
方法,能够在不同距离上实现精确定位,特别是其声
在非完全声道中,直达声线与海面反射声线不仅会
源深度估计能力优于 MFP 方法。此类方法主要利
在直达区形成 Lloyd 镜干涉条纹 (其频率干涉周期
用多途传播模型,通常仅需海深、平均声速作为先验
可用于直达区测深 [86] ),经海底反射后,干涉条纹
信息,而对声速剖面、海底参数等环境参数失配不
可延伸至前几号影区。这些条纹的频率干涉周期
敏感,其中部分定位方法可适应垂直小孔径接收条
可表示为声源深度、到达俯仰角和声速剖面的显函
件,对于移动水平阵定位具有重要应用价值。但是,
数;而在不同声场区域,上述频率干涉周期的函数
此类方法需要根据声源所在区域来选择适配声传
关系近似相同,如图 12 所示。因此,利用频率干涉
播模式的定位算法,这在实际中往往需要人工干预,
周期和到达俯仰角,可在未知声源距离的情况下实
多算法之间的融合处理将是未来的重要研究方向。
现测深 [140−141] 。在完全声道中,根据简正波相速度
与海水声速剖面的关系,可分为纯折射类简正波和
5 机器学习类方法
边界反射类简正波,由于水下声源形成的纯折射类
简正波幅度较大,可将距离 -频率干涉条纹的二维 机器学习方法是由大量数据驱动的另一类定
Fourier 变换谱划分子空间,以估计纯折射类简正波 位方法,机器学习模型能够拟合声源位置与信道响
的能量占比,从而实现水面/水下声源判别 [142] 。该 应之间的函数关系,从而输出声源距离、深度或声
方法可适用于不同声场区域,且无需声源距离作为 源位置的概率分布 [144] 。早在 20 世纪 90年代,研究
先验信息,已被推广至非完全声道环境 [143] 。但其 人员利用感知器进行水下声源深度估计,随后将感