
Page 10 - 《应用声学》2025年第3期
P. 10
544 2025 年 5 月
包括未起飞时转子旋转、不同高度下的垂直移动、 这些数据集为无人机识别算法的开发与验证提供
水平移动以及悬停。DREGON 数据集同样涵盖了 了重要的基础。然而,这些数据集在无人机场景下
无人机在不同飞行状态下的噪声。该数据集中的无 增强任务中尚未被充分利用。
人机飞行模式包括悬停、向上或向下飞行、沿长方 目前,与无人机噪声相关的开源数据集数量较
形轨迹飞行、顺时针或逆时针盘旋以及自由飞行。 少且时长有限。一些方法在生成合成训练集时,不
此外,DREGON 数据集还包含了无人机在不同的 得不使用规模较大的语声数据集和规模较小的噪
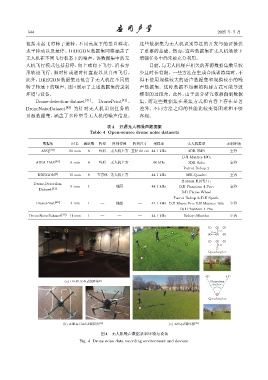
转子转速下的噪声。图 4 展示了上述数据集的录制 声数据集。这种数据不均衡的构建方式可能导致
环境与设备。 模型的过拟合。此外,由于部分研究依赖自制数据
Drone-detection-dataset [41] 、 DronePrint [42] 、 集,而这些数据集在采集方式和内容上存在显著
DroneNoiseDataset [43] 为针对无人机识别任务的 差异,不同方法之间的性能比较变得困难和不够
开源数据集,涵盖了多种型号无人机的噪声信息。 客观。
表 4 开源无人机噪声数据集
Table 4 Open-source drone noise datasets
数据集 时长 通道数 阵型 阵列位置 阵列尺寸 采样率 无人机类型 录制环境
AVQ [39] 50 min 8 环形 无人机上方 直径 20 cm 44.1 kHz 3DR IRIS 室外
DJI Matrice 100;
AIRA-UAS [40] 9 min 8 环形 无人机上方 — 48 kHz 3DR Solo; 室外
Parrot Bebop 2
DREGON [3] 15 min 8 立方体 无人机下方 — 44.1 kHz MK-Quadro 室内
Hubsan H107D+;
Drone-Detection-
5 min 1 — 地面 — 44.1 kHz DJI Phantom 4 Pro; 室外
Dataset [41]
DJI Flame Wheel
Parrot Bebop 2;DJI Spark;
DronePrint [42] 4 min 1 — 地面 — 44.1 kHz DJI Mavic Pro;DJI Matrice 100; 室外
DJI Phantom 4 Pro
DroneNoiseDataset [43] 11 min 1 — — — 44.1 kHz Bebop;Mambo 室内
æ ç è
2 m
2 m
é ê ë
ì í î
2 m
Quadcopter
-45° 45°
(a) DREGONै҄ဗܒ [3] Noiseless
sector
Quadcopter
(b) AIRA-UASै҄ܬ [40] (c) AVQै҄ဗܒ [39]
图 4 无人机噪声数据录制环境与设备
Fig. 4 Drone noise data recording environment and devices