
Page 11 - 《应用声学》2025年第3期
P. 11
第 44 卷 第 3 期 雷菁等: 无人机搜救场景下语声增强技术进展综述 545
专门针对无人机多声源降噪的研究仍较为有限,尚
2 讨论
有待进一步探索。
无人机飞行过程中转子和旋翼会产生巨大的 ᛃೇ ᛃೇ/
自噪声,同时传声器通常安装在距离无人机机身较 үηՂ ᣁߕᣁᤴ
近的位置,这导致传声器采集的声频信号往往具有 Џᰎ
极低的 SNR。相比一般场景中的语声增强任务,无 ηৌ
人机场景下的语声增强面临更为复杂的挑战,主要 ᒭ٪ܦԠ
ᏦηՂ ᣁߕҫᤴए
表现在以下几个方面:首先,噪声源的强度和频率特
性更为复杂,需要考虑转子噪声、气流噪声等多种 图 5 无人机自噪声相关先验信息
噪声成分的干扰;其次,目标信号的传输路径和接收 Fig. 5 A priori information related to drone ego-noise
环境动态变化,可能导致目标信号衰减或失真,进一
现有的无人机场景下的语声增强方法已取得
步增加了语声增强任务的难度。
一定进展,然而,这些方法仍然面临着一些挑战。传
无人机自噪声在搜救场景中通常被视为噪声
统的语声增强方法通常在低 SNR 条件下难以准确
的主要来源,其对语声信号的干扰尤为显著,因此
地估计噪声协方差矩阵。此外,这些传统方法在利
大多数相关研究都将重点放在如何有效消除自噪
用非声学信息对自噪声进行建模时存在一定的局
声上,而较少关注环境噪声的潜在影响。环境噪声
限性。另一方面,尽管深度学习方法在许多领域取
在实际应用中同样会对语声质量产生干扰。然而,
得了显著进展,但目前开源的无人机噪声数据集较
目前的文献中,尽管有一部分工作已经认识到环境
为稀缺 [23−26] ,且数据量通常较小,这使得基于深
噪声的存在 [5,18] ,但这些研究往往缺乏针对环境噪
度学习的模型训练面临挑战。现有的深度学习语声
声的专门分析或处理方法,通常仅将其视为次要因
增强方法大多面向混合信号SNR较高的场景,在低
素一并纳入整体降噪框架,而未设计特定的技术手
SNR环境下,性能往往会显著下降。因此,针对无人
段来专门处理。抑制无人机的自噪声并提取清晰的
机场景的语声增强方法仍需要进一步研究和优化。
语声信号,仍是无人机场景下语声增强任务的主要
挑战。 3 结论
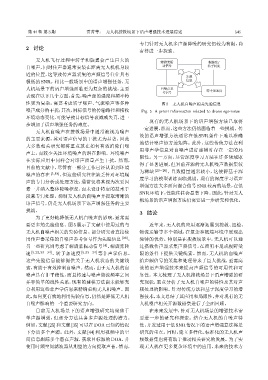
为了更好地降低无人机自噪声的影响,通常需
要更多的先验信息。图 5 展示了文献中使用过的与 近年来,无人机的应用逐渐拓展到搜救、巡检、
无人机自噪声相关的先验信息。部分研究者直接使 物流运输等多个领域,在复杂和极端环境中展现出
用传声器采集的自噪声参考信号作为先验信息 [28] , 独特的优势。特别是在搜救场景中,无人机可以通
另一些研究则考虑了螺旋桨振动信号 [4] 、螺旋桨转 过搭载传声器采集声频信号,在照明不足或视野受
速 [5,22,33−34] 、转子加速度 [5,33−34] 等非声学信息。 限的条件下提供关键线索。然而,无人机的自噪声
这些先验信息能够提供关于无人机状态的关键线 给声频信号的采集和处理带来了巨大挑战,亟需高
索,有助于有效抑制自噪声。然而,由于无人机的自 效的语声增强技术来提高声频信号的可用性和可
噪声具有非平稳性,而且转速与噪声谐波频率之间 靠性。本文梳理了无人机搜救场景下语声增强的研
并非简单的线性关系,现有的建模方法尚未能够充 究现状,重点分析了无人机自噪声的特性及其对声
分利用这些非声学信息来精确重构无人机噪声。因 频处理的影响。针对传统方法和基于深度学习的增
此,如何更有效地利用先验信息,仍然是降低无人机 强技术,本文总结了其应用和局限性,并对现有的无
自噪声影响的一个重要研究方向。 人机噪声相关开源数据集进行了全面回顾。
目前无人机场景下的语声增强研究均聚焦于 在未来发展中,针对无人机场景的增强技术需
单声源增强,但部分方法具备多声源处理的潜力。 要进一步的研究和探索。结合无人机的自噪声特
例如,文献 [25] 和文献 [35] 可以在 DOA已知的情况 性,开发适用于低SNR情况下的语声增强算法将是
下分离多个声源。此外,文献 [44] 利用视频中的空 研究的重点。同时,建立多样化、标准化的无人机声
间信息跟踪多个潜在声源,获取目标源的 DOA,并 频数据集也将有助于推动相关研究的发展。为了实
使用时频空间滤波器从期望的方向提取声音。然而, 现无人机在更多复杂环境中的应用,未来的技术方