
Page 8 - 《应用声学》2025年第3期
P. 8
542 2025 年 5 月
表 1 传统的单通道增强方法
Table 1 Traditional single-channel enhancement methods
研究机构 非声学信息 SNR 采样率 传声器位置 后续应用
里约热内卢军事工程学院 [4] 螺旋桨附近的振动信号 — 8 kHz — 无
首尔国立科技大学 [14] 螺旋桨转速 — — — 无
孟加拉国工程技术大学 [22] 转子转速 — — 无人机下方 声源定位
阿格德大学信息与通信技术系 [23] 无 −15 ∼15 dB 8 kHz — 无
表 2 传统的多通道增强方法
Table 2 Traditional multi-channel enhancement methods
研究机构 通道数 阵型 阵列位置 阵列尺寸 具体方法 SNR 采样率 旋翼数 后续应用
本田技术研究所 [24] 16 球形 无人机侧方 直径 10 cm ORPCA −20 ∼20 dB — 6 声源定位
伦敦玛丽女王大学
8 环形 无人机上方 直径 20 cm ICA −25 ∼ −5 dB 8 kHz 4 无
智能传感中心 [25]
伦敦玛丽女王大学
8 环形 无人机上方 直径 20 cm MWF −30 ∼ 5 dB 8 kHz 4 无
智能传感中心 [15−16]
汉阳大学电子与
2 — 无人机下方 — PMWF — — 4 声源定位
计算机工程系 [26]
澳大利亚国立大学 无人机上方,电机
30 — — MWF+WF −30 ∼ −10 dB 16 kHz 4 无
堪培拉分校 [27] 附近,起落架
鲁汶大学电气工程系 [28] 4, 8, 12 立方体 无人机下方 — PK-MWF −12 ∼ −7 dB 16 kHz 4 无
波束形成的方法则利用声源与噪声的空间方 的无人机噪声,增强目标声源信号。此外,研究人员
位差异来消除噪声的影响。为了显式地利用空间 还考虑了利用无人机自噪声的先验信息来提升算
信息,Wang 等 [15−16] 提出对带噪信号的每个时频 法性能,Tengan 等 [28] 提出利用螺旋桨附近的传声
点估计到达方向 (Direction of arrival, DOA),计算 器采集自噪声参考信号,使用基于先验知识的多通
与已知的目标方向的相似度,进而估计多通道维 道维纳滤波(Priori knowledge multichannel wiener
纳滤波 (Multichannel wiener filter, MWF) 所需的 filter, PK-MWF) 进行语声增强。这类方法的问题
协方差矩阵。为了进一步抑制噪声,也有研究人 是得到准确的噪声协方差矩阵估计较为困难。
员选择两阶段的处理方法。Chio 等 [26] 使用参数化 1.2.2 深度学习方法
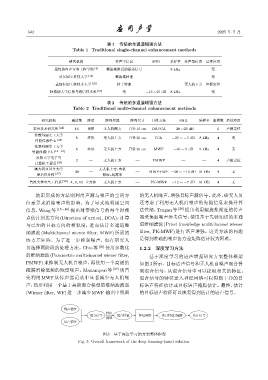
的维纳滤波(Parametric multichannel wiener filter, 基于深度学习的语声增强研究方案整体框架
PMWF) 来抑制无人机自噪声,再使用一个高通的 如图 3 所示。目标语声信号和无人机自噪声混合得
掩膜消除低频的残留噪声。Manamperi 等 [27] 则首 到混合信号,从混合信号中可以提取相关的特征。
先利用 MWF 从传声器记录中显著减少无人机噪 混合信号的特征送入神经网络可以得到干净的目
声,然后利用一个基于高斯混合模型的维纳滤波器 标语声特征估计或目标语声掩膜估计。最终,估计
(Wiener filter, WF) 进一步减少MWF 输出中残留 的目标语声特征可以恢复得到估计的语声信号。
٪ܦηՂ
ྲढ़
ຉՌηՂ ຉՌྲढ़ ᇸፃᎪፏ ͥᝠྲढ़/ଏᒛ ͥᝠηՂ
ଢԩ
ឦܦηՂ
图 3 基于深度学习的方案整体框架
Fig. 3 Overall framework of the deep learning-based solution