
Page 242 - 《应用声学》2025年第3期
P. 242
776 2025 年 5 月
126 kHz ӭ 时也可进行三点及以上的检测,增强导波信号所包
1.0
含的信息。
127 kHz Ѭሏ S1
0.5 A
ॆʷӑࣨϙ 128 kHz ԥ ྲढ़ᑟ᧚
0
B S1
ᚸՌ
129 kHz EL WL WR ER
-0.5 ᪫ϸฉӊ
d > 3λ/2
S1
0 0.1 0.2 0.3 0.4 0.5 0.6
C
ᫎ/ms
ER' WR' WL' EL'
图 6 检测频率为 128 kHz 附近的典型缺陷回波 S1 S2
D
Fig. 6 Typical defect reflective wave in detection
d
frequency near 128 kHz ܱΟ ܱΟ
ЯΟ
(a) ୲ͻ൦ᰡ
2 缺陷特征的多点检测方法
A B
2.1 原理及信号分析 ͜ਖ٨Aੳฉॎ ᑟ᧚Ѭ࣋ ER/EL
根据磁致伸缩导波传感器与检测设备的结构, WL' WR
工程上一般采用自激自收的单点检测方案 [8] 。由于
D C
导波沿正反两个方向的传播能量相等,单点传感器 ܳགೝ Ցረd ᪫ϸฉॎ
EL ER
接收到的回波信号将包含管道的双向信息,基此引 ฉॎ
WR' WL WL' WR
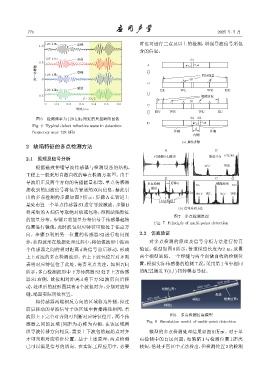
出的多点检测的步骤如图 7 所示:步骤 A 在管道上
ࠫᴏྲढ़
某处布置一个单点传感器S1进行导波激励。步骤B
(b) ηՂѬౢவข
将采集的 A 扫信号取绝对值或包络,得到缺陷特征
图 7 多点检测原理
的能量分布。步骤 C将能量分布信号于传感器起始
Fig. 7 Principle of multi-point detection
位置进行镜像,此时波包对应特征可能处于任意方
向。步骤 D 利用另一位置的传感器 S2 进行相同操 2.2 仿真验证
作,获得波形在数据处理过程中,将镜像波形中按两 对多点检测的原理及信号分析方法进行仿真
个传感器之间的相对距离 d 将信号前后移动,形成 验证。模型如图 8 所示,管道模型长度为 2 m,放置
上下对应的多点检测波形。若上下波包位置对齐则 两个槽型缺陷、一个焊缝与两个自激自收的检测位
表明对应特征位于此处,需要重点关注。如图 7(b) 置,模拟实际传感器的检测工况,采用第 1节中相同
所示,多点检测波形中下方传感器S2处于上方传感 的配置激发T(0,1)扭转模态导波。
器 S1 右侧,故按相对距离 d 将下方 S2 波形向后移 500 mm
动,处理后的波形图共有4 个波包对齐,分别对应焊 500 mm
ೝͯᎶ1
缝、端面实际所处位置。 ཝᎋ
450 mm Ꭵᬞ2 ೝͯᎶ2
将传感器两端相反方向的区域称为外侧,经过
Ꭵᬞ1
前后移动的导波信号于该区域中传播路径相同,若
波形上下完全对齐则可判断对应特征位置。两个传 图 8 多点检测仿真模型
Fig. 8 Simulation model of multi-point detection
感器之间的区域 (间距为 d) 称为内侧,在该区域两
组导波传播方向相反,需要上下波包的起始点对齐 模型的多点检测处理结果如图 9 所示。对于单
才可判断对应特征位置。基于上述原理,两点检测 点检测中的盲区问题,如缺陷 1 与检测位置 1 距离
已可以满足信号的辨向。在实际工程应用中,必要 较短,恰处于盲区中无法检出,但检测位置2的检测