
Page 208 - 201805
P. 208
790 2018 年 9 月
Side scan sonar Output pulse
Graphic recorder geometry
A
Surface echo
Sea surface B
Tow cable
A Sonar towfish Bottom echo
C
Transducers
C
Sand
B waves Target
D
Swath width Target D
Rock Shadow
Bottom
A- Towfish depth below surface Shadow zone
B- Towfish altitude above bottom
C- Slant range to target
D- Acoustic shadow length
B Οੳܦչફఝࢺͻவर C ΟੳܦչˁᄬಖᄱࠫͯᎶ D Οੳܦչܦڏ ๒अԣᄬಖ ॖ
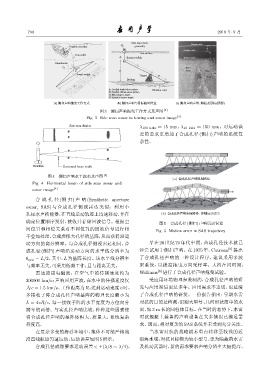
图 3 侧扫声呐拖曳工作方式及声图 [4]
Fig. 3 Side scan sonar in towing and sonor image [4]
4JEF TDBO EJTQMBZ λ 100 kHz ≈ 15 mm,λ 10 kHz ≈ 150 mm。对运动误
差的要求更增加了合成孔径 (侧扫) 声呐的系统复
杂性。
5PXGJTI )PSJ[POUBM CFBN XJEUI
图 4 侧扫声呐水平波束及声图 [4]
(a) Ռੇߘय़ܦչѳय़
Fig. 4 Horizontal beam of side scan sonar and
sonar image [4]
合 成 孔 径 (侧 扫) 声 呐 (Synthetic aperture
sonar, SAS) 与合成孔径侧视雷达类似:利用小
孔径水声换能器,在直线运动轨迹上均速移动,并在 (b) Ռੇߘय़ܦչࠄᬅय़: ͧᬤᤂүឨࣀ
确定位置顺序发射,接收并存储回波信号。根据空 图 5 合成孔径 (侧扫) 声呐运动误差
间位置和相位关系对不同位置的回波信号进行相 Fig. 5 Motion error in SAS trajectory
干叠加处理,合成虚拟大孔径的基阵,从而获得沿运
动方向的高分辨率。与合成孔径侧视雷达相同,合 早在 20 世纪 70 年代中期,合成孔径技术就已
成孔径 (侧扫) 声呐沿运动方向的水平线分辨率为 经尝试用于侧扫声呐。在 1975 年,Cutrona [5] 提出
θ syn = L/2,其中,L 为基阵长度。该水平线分辨率 了合成孔径声呐的一种设计程序,建议采用多波
与频率无关,可采用低频工作;且与距离无关。 束系统,以提高拖曳方向采样率。大约在同时期,
雷达应用电磁波,在空气中的传播速度约为 Williams [6] 进行了合成孔径声呐拖曳试验。
300000 km/s;声呐应用声波,在水中的传播速度仅 受应用环境物理参数制约,合成孔径声呐的研
为c = 1.5 km/s。工作距离为R、达到运动速度v 时, 发与应用滞后雷达多年。应用需求不迫切,也延缓
多接收子阵合成孔径声呐基阵的物理长度最小为 了合成孔径声呐的研发。一份报告指出:早期水雷
L = 4vR/c,每一接收子阵的水平宽度为方位向分 对抗的目的是检测,识别大型号、几何形状简单的水
辨率的两倍。与实孔径声呐比较,种种这些因素使 雷,如2 m 长的圆柱体目标。在当时的态势下,水雷
得合成孔径声呐的基阵体积大、质量大,系统复杂 对抗舰艇上装备的声呐设备在大多情况已满足需
程度高。 求。因而,相对复杂的SAS系统并未受到充分关注。
在复杂多变的海洋环境中,拖体不可能严格地 当水雷对抗的战略战术重点转移至较浅的近
沿直线航迹匀速运动,运动误差如图5所示。 沿海水域,对抗目标物为较小型号、更为隐蔽的水雷
合成孔径成像要求运动误差 < ±(λ/8 ∼ λ/4), 及机动武器时,新的需求要求声呐分辨率大幅提高。