
Page 67 - 201806
P. 67
第 37 卷 第 6 期 崔宝龙等: 基于集合卡尔曼变换的东中国海声学敏感区判定方法 897
f
立的海洋系统与水声系统,笪良龙等 [34] 、过武宏 其中,P 是未经适应性观测的预报误差协方差矩
t v
a
等 [35] 构建了海洋 -声学耦合模式 (Ocean-acoustic 阵,P 是经过适应性观测后的分析误差协方差矩
t v
f
coupled mode, OACM),将声学计算纳入运动的海 阵, I 是单位矩阵,X 是 t v 时刻的集合预报扰动。
t v
洋中,实现水声计算和海洋环境的最佳匹配。本文 根据 S 中对应验证区的信号协方差矩阵的迹计算
结合ETKF敏感区诊断方法与OACM模式,将适应 适应性观测的信号方差σ,
性观测应用于海洋与水声环境预报,基于区域海洋
σ = Tr[L v S(t i+M |H i )], (3)
模型系统 (Regional ocean model system, ROMS)
其中,L v 为局地化算子,表示选取分析误差协方差
海洋模式数据构建海洋环境与声传播损失的集合
减小量中验证区部分的对应关系。
预报,以东中国海宫古海峡北部海域为验证区进行
敏感区诊断仿真计算,分析不同条件下海洋环境敏 重复步骤 (2)、步骤 (3),得到不同观测方案 H i
下的信号方差,进一步构建信号方差分布图,选取信
感区与声学敏感区的仿真结果,结合观测模拟系统
号方差大值区为适应性观测敏感区,本文中取敏感
试验 (Observation simulation system experiment,
区大小等同于验证区大小。
OSSE) 验证在敏感区实施适应性观测对提高预报
质量的有效性。
3 数值试验与验证
2 基于ETKF的敏感区诊断方法 3.1 基于海洋-声学耦合模式的集合预报
不确定性在海洋、声学之间并不是孤立和静止
ETKF 方法 [26−27] 结合了集合转换与卡尔曼
的,呈现出相互作用与传递的特点,海洋 -声学耦合
滤波方法,计算适应性观测后验证时刻验证区内预
模式结合海洋模式与声学模型,通过模拟海洋运动
报误差方差的减小量,与其他敏感区判定方法通过
过程,给出时变和空变的声场环境参数。
寻找最快发展的扰动所在区域相比,含义更加清晰,
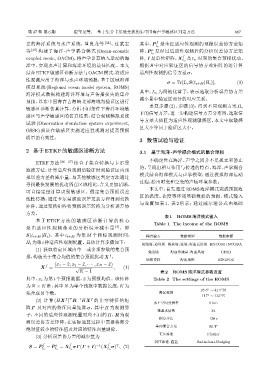
本文中,首先通过 ROMS海洋模式完成预报海
可直接定量计算识别敏感区。假定集合预报误差
区的温度、盐度等环境基础数据的预报,模式输入
线性传播,通过卡尔曼滤波误差更新方程得到变换
与设置如表 1、表 2 所示;通过威尔逊公式由基础
矩阵,通过变换矩阵将预报误差转换为分析误差协
方差。
表 1 ROMS 海洋模式输入
基于 ETKF 方法的敏感区诊断计算的核心
Table 1 The income of the ROMS
是由适应性观测带来的分析误差减小量 [4] ,即
S(t i+M |H i ),其中 t i+M 为第 M 个目标观测时间, 模式输入 数据类型 数据来源
H i 为第i种适应性观测配置。具体计算步骤如下: 初始场、边界场 温盐场、流场、海面高度场 HYCOM+NCODA
(1) 获取特定区域内单一或多项参数的集合预
强迫场 海面热通量、海面风场 CFSR
f
报,构造关于集合均值的集合预报扰动X ,
地形资料 海底地形 ETOPO2
(x 1 − ¯x, x 2 − ¯x, · · · , x N − ¯x)
f
X = √ , (1)
K − 1 表 2 ROMS 海洋模式参数设置
其中,x i 为第 i 个预报数据,¯x 为预报均值。该矩阵 Table 2 The settings of the ROMS
为N × K 维,其中 N 为单个预报中数据长度,K 为
◦
23.5 ∼ 41.5 N
◦
集合成员个数。 海区范围
117 ∼ 133 E
◦
◦
f T
f
(2) 计算 (HX ) R −1 HX 的非零特征值矩
水平空间分辨率 5 km
阵 Γ 及对应的特征向量矩阵 σ,其中 H 为观测算
垂直水层数 32
子,不同的适应性观测配置对应不同的 H,R 为观
积分步长 120 s
测误差协方差矩阵,在实际运算过程中需要将部分
垂向混合方案 KPP
绝对值较小的特征值及对应的特征向量剔除。
正压流速 Flather
(3) 分析误差协方差的减少量为
斜压流速、温盐 Radiation+Nudging
f a f −1 f T
S = P − P = X σΓ (Γ + I) (X σ) , (2)
t v t v t v t v