
Page 68 - 201806
P. 68
898 2018 年 11 月
数据得到声速场的动态预报;在此基础上读取水声 失;南部沿海地区,黑潮路径和朝鲜海峡附近,初始
环境数据库中的海底地形、密度、声速、吸收系数等 扰动得到了累积,符合东中国海动力学特征,但在模
地声参数,结合声速场作为输入传递给波束位移射 式开边界区域有一部分并不符合海洋环流特征的
线简正波 (Beam-displacement ray-mode, BDRM) 误差发展,这主要是模式本身的问题导致。与之相
声场计算模型,完成声源深度10 m、接收深度30 m、 比,声传播损失的误差发展情况更加清晰,主要集中
声源频率 100 Hz、传播距离 5000 m 的相关海区声 在黑潮流经区域,但在台湾北部地区稍有偏离,在模
场计算。以上计算过程均通过高性能计算机并行计 式开边界区域没有误差累积。
算实现,整体数据流程如图2所示。
ROMS WilsonНर BDRMവی
采用模型预报结果作为初始真值,对海区整体 ๒ภവर +ڡܦԠ
ܦᤴए ͜୧૯ܿ
添加扰动以获取30个初始场,在此基础上模拟运转 ພए P↼r֒z s֒z,w↽
20 天得到集合预报。为检验集合预报误差发展情 ᄢए c/⊲ / 8p/r e S l Φ l ↼z↽
๒ื
ip/4
⇁Dc T⇁Dc S
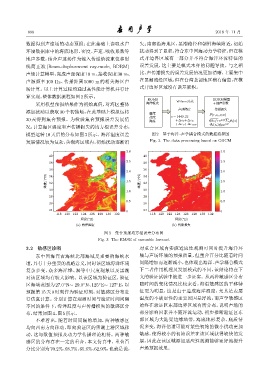
况,计算海区温度和声传播损失的均方根误差分布, ⇁Dc P⇁Dc STP SΦ l ↼z s ↽ µ l e iν l r
模型运转10天后的分布如图3所示。海洋温度误差 图 2 基于海洋 -声学耦合模式的数据流程图
发展情况较为复杂,黄渤海区域内,初始扰动逐渐消 Fig. 2 The data processing based on OACM
3.0 3.0
40 40
2.5 2.5
38 38
36 36
2.0 34 2.0
ጤए/(°N) 32 1.5 ጤए/(°N) 32 1.5
34
30 30
1.0 1.0
28 28
0.5 0.5
26 26
24 24
0 0
118 120 122 124 126 128 130 132 118 120 122 124 126 128 130 132
ፃए(°E) ፃए(°E)
(a) ๒ภພए (b) ͜୧૯ܿ
图 3 集合预报均方根误差分布图
Fig. 3 The RMSE of ensemble forecast
3.2 敏感区诊断 对重合区域内实施适应性观测可同时提升海洋环
东中国海宫古海峡北部海域是重要的海峡水 境与声场环境的预报质量,但重合百分比随着时间
道,具有十分重要的战略意义,同时该区域海洋环境 间隔增加而逐渐减小,也体现出海洋-声学耦合模式
复杂多变,众多海洋锋、涡等中尺度现象以及黑潮 下二者作用机理及发展模式的不同,该结论将在下
对该区域均有较大影响。以该区域为验证区,验证 文的验证试验中被进一步证实。从两种敏感区分布
区海域范围为 27.0 N∼ 29.0 N、125 E∼ 127 E,以 随时间的变化情况比较来看,海温敏感区的平移特
◦
◦
◦
◦
预报第 15 天 0 时刻作为验证时刻,对敏感区分布进 征更为明显,这是由于造成海洋温度,尤其是表层
行仿真计算。分别计算在观测时间与验证时间间隔 温度的不确定性的主要原因是洋流,而声学敏感区
不同的条件下,海洋温度与声传播损失的敏感区分 始终在验证区东部边界区域有所分布,说明声场的
布,结果如图4、图5所示。 部分影响因素并不随洋流运动,初步推断验证区东
不难看出,随着时间间隔的增加,两种敏感区 部区域为大陆架边缘地带,海底地形复杂、底质情
均向西南方向移动,即向验证区的黑潮上游区域移 况多变,海洋信道可能对某些初始的微小扰动更加
动,这与数值预报及动力学传播理论相符。两种敏 敏感,使得较小的初始误差在该区域获得较快的发
感区的分布存在一定的重合,本文仿真中,重合百 展,因此在该区域添加适应性观测能够更好地提升
分比分别为70.2%、68.7%、65.6%、62.9%,也就是说, 声场预报效果。