
Page 84 - 201806
P. 84
914 2018 年 11 月
error rate, EER) 作为评价指标。FAR 是指系统将 波附近的信号的敏感性。在理论上稳态强谐波表征
非无人机目标识别成无人机目标而引发的错误报 了飞行器的结构特征,相比其他谐波,稳定性与能量
警;LAR 是指系统将无人机目标识别成非无人机目 较高,不易被噪声淹没,具有更好的抗噪声能力。为
标而引起的目标遗漏。理想的识别器可以使 FAR 了验证改进的 MFCC的抗噪能力,单独使用无人机
与 LAR 同时达到最小值,但是在实际情况中,由于 声信号作为测试样本对系统漏警率的抗噪性能进
环境的复杂性等因素,系统很难达到如此理想的性 行仿真,结果用识别率表示,识别率与漏警率的关系
能,这就需要调整阈值使两者得到平衡,阈值的提高 如下:
会增加漏警率导致系统警戒性的降低,阈值的减小
识别率 = 1 − 漏警率. (11)
会增加系统的虚警。通常将虚警率与漏警率相等时
对应的错误识别率称为等误识率,此时对应的阈值
称为等误识阈值。本文采用高斯混合模型进行分类 80 ͜ፒMFCC-FAR
వMFCC-FAR
识别,使用三种型号的小型无人机声信号进行模型 ͜ፒMFCC-LAR
的训练,经过训练后得到包含三个 GMM 模型的识 60 వMFCC-LAR
别器,每个 GMM 模型分别针对一种型号的小型无 FAR & LAR/%
人机。用λ表示 GMM模型的参数,y 表示某一测试 40
样本,则该模型产生测试样本y 的概率为P(y|λ),判
20
决阈值为η,判决准则为
P(y|λ) > η : 目标为无人机, 0 0.2 0.4 0.6 0.8 1.0
0
0 6 η 6 1. ϙ
P(y|λ) 6 η : 目标为非无人机,
(10) 图 6 虚警率与漏警率随阈值的变化曲线
仿真中使用的三种小型无人机型号分别为 Fig. 6 FAR and LAR vary with the Threshold.
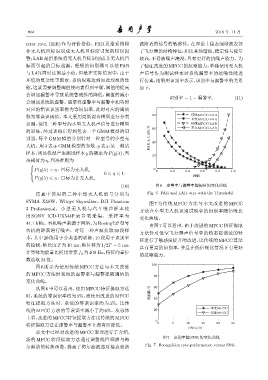
SYMA X5SW、Wltoys Skywalker、DJI Phantom 图 7 为传统 MFCC 方法与本文改进的 MFCC
3 Professional, 小型无人机与汽车噪声样本使
方法在小型无人机识别试验中的识别率随信噪比
用 SONY ICD-UX544F 录 音 笔 采 集, 采 样 率 为
变化曲线。
44.1 kHz。客机噪声来源于网络,为Boeing737 型号
由图 7 可以看出,由于改进的 MFCC 特征提取
客机的降落滑行噪声。对每一种声源获取 30 段样
方法针对低空飞行器声信号中的稳态强谐波的特
本,其中 20 段用于分类器的训练,10 段用于识别率
征进行了敏感度提升的改进,比传统的 MFCC算法
的检测,帧长度T 为10 ms,帧位移为 1/2T = 5 ms,
具有更高的识别率,并且在低信噪比情况下有更好
计算峰均能量比所用带宽f d 为400 Hz,特征向量位
的抗噪能力。
数选取24位。
100
图 6 所示为使用传统 MFCC 方法与本文改进
的 MFCC 方法时系统的虚警率与漏警率随阈值的 80
变化曲线。
从图 6 中可以看出,使用 MFCC 特征提取方法 60
时,系统的等误识率约为 9%,而使用改进的 MFCC គѿဋ/% 40
特征提取方法时,系统的等误识率约为 3%,比传
统的 MFCC 方法的等误识率减小了约 6%。从总体 20 వMFCC
͜ፒMFCC
上看,改进的MFCC特征提取方法比传统的MFCC
0
特征提取方法在虚警率与漏警率上都有所降低。 0 5 10 15 20 25
SNR/dB
前文中已经对改进的 MFCC 原理进行了介绍,
图 7 识别率随 SNR 的变化曲线
新的 MFCC 特征提取方法通过调整线性频谱与梅
尔频谱的转换函数,提高了梅尔滤波器对稳态强谐 Fig. 7 Recognition rate performance versus SNR.