
Page 161 - 201903
P. 161
第 38 卷 第 3 期 李佳蔚等: 利用气枪声源数据的地声参数反演 443
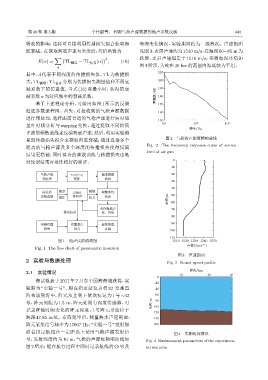
吸收的影响,这样可直接利用传播损失拟合获取海 海深变化情况,实验期间约为一级海况。声速剖面
底衰减。在获取海底声速与密度后,代价函数为 见图 3,表层声速约为1540 m/s,在海深60∼85 m为
∑ ( ) 2 跃层,之后声速恒定于 1518 m/s;实测海深环境如
E(α) = TL 测量 − TL 仿真 (α) , (16)
d 图4所示,大致在30 km的范围内海底较为平坦。
210
其中,d 代表不同深度的传播损失值,TL 为传播损
失,TL 测量 、TL 仿真 分别为传播损失测量值和不同衰 200
减系数下的仿真值,当式 (16) 取最小时,获得的衰 190
减系数α 为对应频率的衰减系数。 ܦູጟ/dB 180
基于上述理论分析,可给出如图 1 所示的反演 170
海底参数流程图。首先,对接收到的气枪声源数据 160
进行预处理,选择距离合适的气枪声源进行短时傅
150
里叶时频分析与 warping 变换,通过提取不同阶简 10 1 10 2 10 3
ᮠဋ/Hz
正波的频散曲线来反演海底声速;然后,利用实验测
量的传播损失拟合来获取海底衰减;通过选择多个 图 2 气枪的声源级频响曲线
距离的气枪声源及多个深度的传播损失使得反演 Fig. 2 The frequency response curve of source
level of air gun
结果更稳健,同时拟合的频散曲线与传播损失也是
对反演结果有效性较好的验证。 0
10
ඡ౯ܦູ warping ଢԩᮠங 20
ᮕܫေ ԫ૱ జጳ
30
40
ॠԦ ଽጊ ܦڤᝠ ϙ ᮠஙజጳ
ඵງ/m 60
Ԡᔵڊ ካข ካሮऀ ͌ᄾ લՌ 50
ර४๒अܦ 70
ϙ͌ᄾ ᤴnjࠛए
80
ࠄ͜୧ ͜୧૯ܿ ᖍԩ๒अ 90
૯ܿ લՌ ᛰѓ
100
110
图 1 地声反演流程图 1510 1520 1530 1540 1550
ܦᤴ/(mSs -1 )
Fig. 1 The flow chart of geoacoustic inversion
图 3 声速剖面
2 实验与数据处理 Fig. 3 Sound speed profile
2.1 实验情况 ᡰሏ/km
10 20 30
0
海试数据于 2017 年 7 月东中国海海域获得,实 20
验船为 “实验一号”,船在指定站位点将 32 元垂直 40
阵布放到海中,阵元从上到下依次标记为 1 号 ∼32 60
号,阵元间距为 1.5 m,阵元处附有深度传感器,可 ඵງ/m 80
记录阵随时间变化的阵元深度,1 号阵元开始位于 100
120
海深 47.85 m 处。布阵完毕后,测量海水声速剖面; 140
阵元采集信号频率为17067 Hz;“实验一号” 发射船 160
沿着指定航线在一定距离上使用气枪声源发射信 图 4 实测海深情况
号,发射深度约为 10 m,气枪的声源级频响曲线如 Fig. 4 Environment parameters of the experimen-
图 2 所示;船在航行过程中同时记录航线的 GPS 及 tal sea area