
Page 174 - 201903
P. 174
456 2019 年 5 月
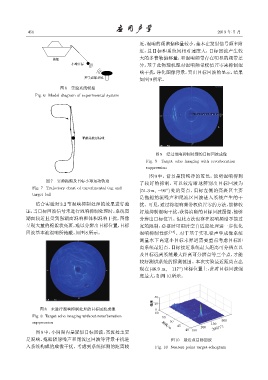
近,混响的频谱偏移量较小,基本在发射信号频率附
近,且目标和系统间相对速度大,目标回波产生较
大的多普勒偏移量,和混响频带存在明显的频带差
ફᓕ
࠵ုᄬಖ 异,基于此物理机理对混响频带权值置零来抑制混
响干扰,净化图像背景,突出目标回波的显示,结果
ܦߦੇϸጇፒ
如图9所示。
图 6 实验系统模型
Fig. 6 Model diagram of experimental system
᭬ᓕՎஊᄬಖု
图 9 经过混响抑制处理的目标回波成像
Fig. 9 Target echo imaging with reverberation
suppression
图 9 中,背景是较纯净的蓝色,说明混响得到
图 7 实验拖船及目标小球运动轨迹
了较好的抑制,可以较清晰地辨别出目标回波为
Fig. 7 Trajectory chart of experimental tug and
(51.3 m, −90 ) 处的亮点,目标左侧的亮斑区主要
◦
target ball
是拖船的流噪声和尾流区回波进入系统产生的干
结合实验对 3.2 节混响抑制处理的效果进行验 扰。可见,通过将混响频带权值置零的方法,能够较
证,当目标回波信号未进行混响抑制处理时,系统离 好地抑制混响干扰,获得清晰的目标回波图像,能够
湖面较近且受到强湖面混响和体积混响干扰,图像 分辨出目标位置。但此方法也存在混响频谱不能过
呈现大量的棉絮状亮斑,难以分辨出目标位置,目标 宽的限制,必要时可用时空自适应处理进一步优化
回波基本被混响所掩蔽,如图8所示。 混响抑制性能 [14] 。对于基于实孔径声学成像系统
测量水下高速小目标末弹道需要重点考虑目标距
离系统最近点、目标接近系统最大距离可分辨点以
及目标远离系统最大距离可分辨点等三个点,才能
较好测试系统的探测范围。本次实验最近距离点出
现在(46.9 m, −117 )坐标位置上,此时目标回波强
◦
度最大,如图10所示。
40
ࣨए 20
图 8 未进行混响抑制处理的目标回波成像 0
60
Fig. 8 Target echo imaging without reverberation 55
suppression 50 150 300
45
200 வͯ/(O)
ᡰሏ/m
图8 中,小圆圈内是疑似目标回波,亮斑处主要 40 150
是混响、拖船辐射噪声和尾流区回波等背景干扰进 图 10 最近点目标回波
入系统构成的成像干扰。考虑到系统探测的距离较 Fig. 10 Nearest point target echogram