
Page 171 - 201903
P. 171
第 38 卷 第 3 期 张思宇等: 基于实孔径成像的水下高速小目标末弹道测量方法 453
(Fast Fourier transform, FFT)运算的特点,系统采
0 引言
取专门的数字信号处理 (Digital signal processing,
DSP)芯片进行 FFT,在频域进行波束形成,缩短信
随着水中兵器日益朝着智能化、高机动、大威
号处理时间,提高成像的实时性。同时,根据高速运
力的方向发展,精确测量其水下运动轨迹对武器装
动目标的回波多普勒偏移大,导致信号输出幅值变
备试验定型、性能评估和战法训法制定具有越来越
化和波束指向性偏移引起图像失真或畸变的问题,
重要的参考意义。水中兵器弹道测量系统主要分为
针对性设计双曲调频信号作为发射信号和采用宽
内测系统和外测系统 [1−13] 。内测系统主要通过目
带信号处理技术,获得目标回波图像。
标安装的惯性装置测量并记录航行过程中的加速
度、角度和深度等运动参数,进而解算出目标的速
度、姿态和轨迹信息。外测系统主要有长基线定位
系统、短基线定位系统和超短基线定位系统,通过水
R 0
下弹道测量系统和目标安装的合作声信标测量目 N
标斜距和方向,实现目标定位和轨迹测量。但是,在
陌生水域测量高速小目标的末弹道,由于小目标无
法安装合作声信标且没有水下弹道测量系统配合,
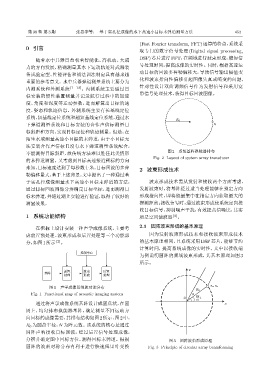
不能测得目标斜距,故传统方法难以胜任此类情形 图 2 系统基阵换能器排布
Fig. 2 Layout of system array transducer
的末弹道测量。又考虑到目标高速接近靶标的方向
未知,目标速度达到了每秒数十米,目标回波的多普 2 波束形成技术
勒偏移量大,基于上述背景,文中提出了一种通过基
于实孔径成像测量水下高速小目标末弹道的方法, 波束形成技术需从发射和接收两个方面考虑,
通过目标回波图像分辨确定目标坐标,进而测得目 发射波束时,将基阵经过适当处理能够在预定方向
标末弹道,并通过湖上实验进行验证,取得了较好的 形成指向性,即将能量集中在指定方向获取最大的
测量效果。 探测距离;接收信号时,通过波束形成使系统定向接
收目标信号,抑制噪声干扰,有效提高信噪比,其实
1 系统功能结构 质是空间滤波器 [3] 。
在靶标上设计安装一种声学成像系统,主要考 2.1 圆阵波束形成的基本原理
虑前置预处理、波束形成和后置处理等三个功能部 因为发射波束形成技术和接收波束形成技术
分,如图1所示 [2] 。 的基本原理相同,且系统采用 DSP 芯片,能够节约
计算时间,提高系统成像的实时性,文中以接收端
҄˗ॷ
为例说明圆阵的频域波束形成,其基本原理如图 3
所示。
y
ҒᎶ ฉౌ ՑᎶ
۳
ܫေ ॎੇ ܫေ
图 1 声学成像系统的功能分布 x i ֒ y i
R 0
Fig. 1 Functional map of acoustic imaging system θ
O p i
N
通过将声学成像系统基阵设计成圆盘状,在圆 x
周上,均匀排布换能器基阵,满足测量不同运动方
向目标的成像需要,其排布结构如图2 所示,图2中,
R 0 为圆盘半径,N 为阵元数。该系统的核心是通过
圆阵声呐接收目标回波,经过后置信号处理成像,
分辨并确定图中目标方位,测得目标末弹道。根据 图 3 圆阵波束形成原理
圆阵的波束对称分布有利于进行快速傅里叶变换 Fig. 3 Principle of circular array beamforming