
Page 173 - 201903
P. 173
第 38 卷 第 3 期 张思宇等: 基于实孔径成像的水下高速小目标末弹道测量方法 455
有较大的影响。且末弹道测量时,目标到靶标的 3.1 宽带处理技术原理
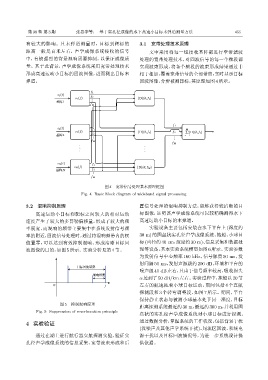
距离一般是百米左右,声学成像系统接收的信号 文中采用将每一组接收基阵都进行窄带滤波
中,有较强烈的背景混响需要抑制,以保证成像质 处理的宽带处理技术,对回波信号的每一个频段都
量。基于此背景,声学成像系统采用宽带处理技术 实现波束形成,将各个频段的波束形成结果通过非
形成高速运动小目标的回波图像,进而测出目标末 相干相加,覆盖宽带信号的全部带宽,实时显示目标
弹道。 回波图像,分辨被测目标,其原理如图4所示。
f
s ↼t↽
f
s ↼f↽ D↼θ֒f ↽
۳
f M
f
s ↼t↽ M
s ↼f↽ f D↼θ֒f ↽ f S D↼θ֒f i ↽
f
۳ i/
f M
f M
s N ↼t↽
f
s N ↼f↽ D↼θ֒f M ↽
۳N f
f M
图 4 宽带信号处理基本原理框图
Fig. 4 Basic block diagram of wideband signal processing
3.2 混响抑制原理 置信号处理的混响抑制方法,能够获得较清晰的目
高速运动小目标和靶标之间较大的相对运动 标图像,证明该声学成像系统可以较精确测得水下
速度产生了较大的多普勒偏移量,形成了较大的频 高速运动小目标的末弹道。
率展宽,而混响的频带主要集中在系统发射信号频 实验设备主要包括安装在水下平台上 (深度约
率的附近,回波信号处理时,通过将混响频带内的权 30 m) 的圆盘状实孔径声学成像系统、拖船、小球目
值置零,可以达到有效抑制混响、形成清晰目标回 标(直径约40 cm,深度约30 m)、信息采集和数据处
波图像的目的,如图5所示。实验分析见第4节。 理等设备,基本实验系统模型如图6所示。实验参数
为发射信号中心频率 160 kHz,信号脉宽 50 ms,发
射间隔50 ms,发射声源级约200 dB,环境和平台的
ᄬಖڀฉࣜࠕ
噪声级40 dB 左右,且由于信号频率较高,吸收损失
ຉ־ࣜࠕ
α达到了50 dB/km左右。实验过程中,拖船以20节
o f 左右的航速拖着小球目标运动,期间包括 4 个直航
探测段和 3 个转弯调整段,如图 7 所示。期间,平台
保持静止状态与被测小球基本处于同一深度,目标
图 5 抑制混响原理
距离探测系统最近约30 m,最远约300 m,并利用圆
Fig. 5 Suppression of reverberation principle
盘状的实孔径声学成像系统对小球目标进行探测。
4 实验验证 通过数据分析,掌握系统的工作状况,包括背景干扰
(流噪声及其他声学系统干扰)、尾流区回波、系统电
通过在湖上进行航行器实航探测实验,验证实 源干扰以及目标回波情况等,为进一步系统设计提
孔径声学成像系统的信息采集、宽带波束形成和后 供依据。