
Page 175 - 201903
P. 175
第 38 卷 第 3 期 张思宇等: 基于实孔径成像的水下高速小目标末弹道测量方法 457
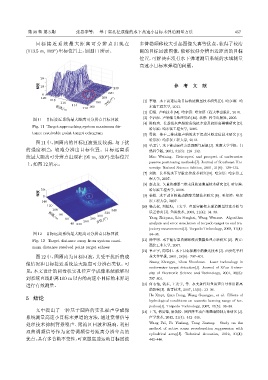
目 标 接 近 系 统 最 大 距 离 可 分 辨 点 出 现 在 多普勒频移较大引起图像失真等优点,获得了较清
(113.5 m, 189 )坐标位置上,如图11所示。 晰的目标回波图像,能够较好分辨出近距离的目标
◦
位置,可解决在没有水下弹道测量系统的水域测量
高速小目标末弹道的问题。
20
ࣨए 10 240 参 考 文 献
220
0
120 200
118 வͯ/(O) [1] 李想. 水下高速运动目标轨迹测量技术研究 [D]. 哈尔滨: 哈
116 180
114
112 160 尔滨工程大学, 2011.
ᡰሏ/m
[2] 田坦. 声呐技术 [M]. 哈尔滨: 哈尔滨工程大学出版社, 2016.
图 11 目标接近系统最大距离可分辨点目标回波 [3] 李启虎. 声呐信号处理引论 [M]. 北京: 科学出版社, 2006.
[4] 陈晓忠. 长基线水声跟踪系统抗多途及抗距离模糊研究 [D].
Fig. 11 Target approaching system maximum dis-
哈尔滨: 哈尔滨工程大学, 2005.
tance resolvable point target echogram [5] 勇俊. 基于二维成像声纳的水下运动目标定位技术研究 [D].
哈尔滨: 哈尔滨工程大学, 2012.
图 11 中,圆圈内的目标回波强度较弱,与干扰
[6] 毛卫宁. 水下被动定位方法回顾与展望 [J]. 东南大学学报: 自
的强度相当,较难分辨出目标位置。目标远离系 然科学版, 2001, 31(6): 129–132.
统最大距离可分辨点出现在(95 m, 320 ) 坐标位置 Mao Weining. Retrospect and prospect of underwater
◦
上,如图12所示。 passive positioning methods[J]. Journal of Southeast Uni-
versity: Natural Science Edition, 2001, 31(6): 129–132.
[7] 刘俊. 长基线水下导航定位技术研究 [D]. 哈尔滨: 哈尔滨工
程大学, 2007.
[8] 赵龙龙. 矢量传感器三维末段轨迹测量技术研究 [D]. 哈尔滨:
ࣨए 50 0 [9] 杨娟. 水下动目标被动跟踪关键技术研究 [D]. 哈尔滨: 哈尔
哈尔滨工程大学, 2008.
140 滨工程大学, 2007.
120 [10] 杨志权, 刘松海, 王文学. 鱼雷实艇靶末弹道测量算法分析与
100 340
320 误差仿真 [J]. 鱼雷技术, 2003, 11(4): 34–38.
80 300
60 280 Yang Zhiquan, Liu Songhai, Wang Wenxue. Algorithm
ᡰሏ/m
260 வͯ/(O)
40 240 analysis and error simulation of torpedo target-to-end tra-
jectory measurement[J]. Torpedo Technology, 2003, 11(4):
图 12 目标远离系统最大距离可分辨点目标回波 34–38.
Fig. 12 Target distance away from system maxi- [11] 徐宇明. 水下航行器内测系统及数据处理方法研究 [D]. 西安:
西北工业大学, 2007.
mum distance resolved point target echoes
[12] 章正宇, 周寿桓. 水下目标探测中的激光技术 [J]. 西安电子科
图 12 中,圆圈内为目标回波,其受干扰后的成 技大学学报, 2001, 28(6): 797–801.
像情况和目标接近系统最大距离可分辨点类似。可 Zhang Zhengyu, Zhou Shouhuan. Laser technology in
underwater target detection[J]. Journal of Xi’an Univer-
见,本文设计的圆盘状实孔径声学成像系统能够对 sity of Electronic Science and Technology, 2001, 28(6):
到系统直线距离100 m以内的高速小目标的末弹道 797–801.
进行有效测量。 [13] 何心怡, 钱东, 王光宇, 等. 水文条件对鱼雷声自导作用距离
的影响 [J]. 鱼雷技术, 2007, 15(5): 33–36.
He Xinyi, Qian Dong, Wang Guangyu, et al. Effects of
5 结论
hydrological conditions on acoustic homing range of tor-
pedoes[J]. Torpedo Technology, 2007, 15(5): 33–36.
文中提出了一种基于圆阵的实孔径声学成像 [14] 王飞, 傅寅锋, 唐劲松. 圆柱阵主动声纳混响抑制方法研究 [J].
系统测量高速小目标末弹道的方法,通过宽带信号 声学技术, 2012, 31(4): 442–446.
处理技术抑制背景噪声、尾流区回波和混响,利用 Wang Fei, Fu Yinfeng, Tang Jinsong. Study on the
method of active sonar reverberation suppression with
双曲调频信号作为宽带调频信号距离分辨率高的
cylindrical array[J]. Technical Acoustics, 2012, 31(4):
优点,具有多普勒不变性,可克服高速运动目标回波 442–446.