
Page 160 - 应用声学2019年第4期
P. 160
620 2019 年 7 月
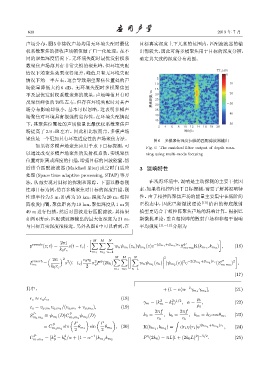
声场分布,图 5 中接收声场均用无环境失配时最优 目标真实深度上下几米的范围内,匹配滤波器的输
权系数聚焦的接收声场幅值做了归一化处理。在不 出都较大,因此可将多模聚焦用于目标的深度分辨,
同的聚焦深度情况下,无环境失配时最优发射权系 确定其大致的深度分布范围。
数聚焦声场都具有非常尖锐的聚焦峰,但环境失配
TL/dB
情况下的聚焦效果变得很差,峰值只有无环境失配 0
情况下的一半左右,这会导致期望聚焦位置处的声 5
10 -10
场能量降低大约 6 dB。无环境失配时多模聚焦虽 15
不及最优发射权系数聚焦的效果,声场峰值只有时 20 -20
反聚焦峰值的 70% 左右,但存在环境失配时对其声 ᐑཥງए/m 25 -30
30
场分布影响却很小,基本可以忽略,这表明多模声 35
-40
场聚焦对环境具有很强的宽容性,在环境失配情况 40
45
下,其聚焦位置处的声场能量比最优权系数聚焦声 -50
2 4 6 8 10 12 14 16 18 20
场提高了 2.9 dB 左右。因此相比较而言,多模声场 ᫎ/s
聚焦是一个更加具有环境适应性的声场聚焦方法。 图 6 多模聚焦深度扫描的匹配滤波器输出
如果将多模声场聚焦应用于水下目标探测,可 Fig. 6 The matched filter output of depth scan-
以通过改变多模声场聚焦的发射权系数,实现聚焦 ning using multi-mode focusing
位置对距离或深度的扫描,增强目标的回波能量,然
后结合匹配滤波器 (Matched filter) 或空时自适应 3 混响特性
处理(Space time adaptive processing, STAP)等方
法,从而实现对目标的探测和跟踪。下面以静态刚 在浅海环境中,混响是主动探测的主要干扰因
性球目标为例,仿真多模聚焦对目标的深度扫描,刚 素,如果将相控阵用于目标探测,需要了解其混响特
性球半径为 5 m,距离为 10 km,深度为 20 m,相控 性。由于相控阵聚焦声场的能量主要集中在低阶简
阵收发同置,聚焦距离为10 km,聚焦深度从 1 m到 正模态中,因此巴斯微扰理论 [10] 给出的海底散射
49 m 进行扫描,然后对回波进行匹配滤波,其结果 模型更适合于相控阵聚焦声场的混响计算。根据巴
如图6 所示,匹配滤波器输出的最大值深度为21 m, 斯微扰理论,垂直相控阵的散射声场和非相干混响
与目标真实深度很接近。另外从图6中可以看到,在 平均强度 [11−12] 分别为
[ M M N ]
2πi ∑ ∑ ∑
p reverb (z; t) = s(t − t c ) · w n ψ m 1 (z n )ψ m 2 (z)e −(β m 1 +β m 2 )r c S P K(k m 1 , k m 2 ) , (16)
m 1 m 2
k 0 r c
m 1 m 2 n=1
M M [ N 2 ]
( 2π ) 2 c 0 τ 0 ∑ ∑ ∑
reverb
2
η
2
2
I inc = s (t−t c ) σ P (2k 0 ) w n ψ m 1 (z n ) |ψ m 2 (z)| e +β m 2 )r c (S P ) ,
2 −2(β m 1
η
k 0 r c 2 m 1 m 2
m 1 m 2 n=1
(17)
其中, + (1 − α)α −2 γ m 1 m 2 ], (21)
γ
r c ≈ c g t c , (18) 2 2 1/2 ρ b
γ m = (k − k ) , α = , (22)
m
b
v ), (19) ρ 0
c g = v g,m 1 g,m 2 /(v g,m 1 + v g,m 2
2πf 2πf
S P ≡ ψ m 1 (D)C P ψ m 2 (D) k 0 = , k b = , k m = k 0 cos θ m , (23)
m 1 m 2 m 1 m 2
c 0 c b
( ) ( ) ∫
P P
P
= C sin θ m 1 sin θ m 2 , (20) ) ≡ dr 1 η(r 1 )e i(k m 1 +k m 2 )r 1 , (24)
m 1 m 2 K(k m 1 , k m 2
2 2
2
η
2 −3/2
2
C P = [k − k /α + (1 − α −1 k P (2k 0 ) = πL[1 + (2k 0 L) ] . (25)
m 1 m 2 0 b )k m 1 m 2