
Page 51 - 应用声学2019年第4期
P. 51
第 38 卷 第 4 期 冯西安等: 水下移动平台网络化协同探测技术发展 511
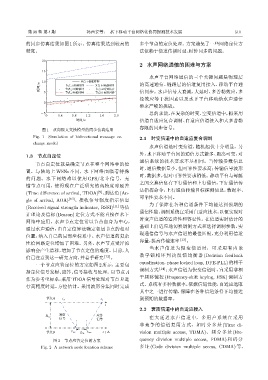
的同步仿真结果如图 1 所示。仿真结果达到较高的 多个节点的定位处理。方案避免了一些网络定位方
精度。 法依赖于信道传播时延、时钟同步的问题。
20
2 水声网络通信的困难与方案
15
水声平台网络通信的三个关键问题是物理层
10 ᓬག i ಖю᧿ 的高速通信、链路层的信道复用接入、移动平台通
ᫎ/s 5 ᓬག j ឨࣀ᧿ ᓬག k ឨࣀ᧿ 信同步。水声信号大衰减、大延时、多普勒效应、多
ᓬག j ᧿ͥᝠ
ᓬག k ᧿ͥᝠ
ᓬག j ಣю᧿
ᓬག k ಣю᧿
径效应等干扰因素以及水下平台移动给水声通信
0
带来严峻的挑战。
-5 总的来说,在复杂的时变、空变信道中,拟采用
0 0.4 0.8 1.2 1.6 2.0
ᫎ/s 信道自适应复合调制、自适应信道接入和大多普勒
容限的同步信号。
图 1 双向报文交换模型的同步仿真结果
Fig. 1 Simulation of bidirectional message ex- 2.1 时变信道中的自适应复合调制
change model
水声信道是时变信道,随机起伏十分明显。另
1.3 节点自定位 外,水下移动平台间的通信方式繁多、距离可变,对
通信系统的技术要求不尽相同。当传输参数信息
节点自定位就是确定节点在整个网络中的位
时,通信数据量小,但可靠性要求高;传输信号波形
置。与陆地上 WSNs 不同,水下网络面临着特殊
时,数据多,但对可靠性要求稍低。移动平台与母艇
的问题。水下网络难以使用 GPS/北斗信号,无
之间交换信息有下行通信和上行通信,下行通信传
锚节点可用,使得现在广泛研究的高精度时延差
达指挥命令,上行通信传输目标探测信息,数据率、
(Time difference of arrival, TDOA) 、到达角(An-
[9]
可靠性要求不同。
gle of arrival, AOA) [10] 、接收信号强度指示信息
为了保障在各种信道条件下均能达到预期的
(Received signal strength indicator, RSSI) [11] 等估
通信性能,调制系统宜采用自适应技术,以便实现对
计理论及信标 (Beacon) 定位方式不能直接在水下
时变声信道的适应性和容忍性。在信道实时估计的
网络中应用。水声节点定位常以节点自身为中心,
基础上自适应地切换调制方式和选择调制参数,实
通过水声通信,由自定位算法确定邻居节点的相对
现通信信号与水声信道的最佳匹配,充分利用信道
位置,纳入自己的局部坐标系中。水声信道的复杂
容量,提高传输速率 [13] 。
性给网路定位增加了困难。另外,水声节点受洋流
当水声信道为慢变信道时,可采用有内嵌
影响会产生漂移,增加了节点定位的难度。目前,人
们已注意到这一研究方向,并着手研究 [12] 。 数字锁相环判决反馈均衡器 (Decision feedback
equalization- phase locked loop, DFE-PLL)的相干
一个节点应答定位的方案如图 2 所示,主要包
调制方式 [14] ;水声信道为快变信道时,宜采用非相
括定位信号发射、应答、信号接收与处理。以节点 A
干频移键控 (Frequency-shift keying, FSK) 调制方
作为参考坐标系,采用 TDOA信号处理对节点B 进
式。系统有多种数据率,依据信道性能,自适应选取
行高精度时延、方位估计。采用波形分集同时完成
其中之一进行传输,保障在各种信道条件下均能达
ᓬགA t s t e 到预期的数据率。
t
2.2 衰落信道中的自适应接入
ԧ࠱ ऄን
R u 在大延迟水声信道中,多用户系统宜采用
ηՂ ηՂ
非竞争的信道复用方式,如时分多址 (Time di-
ᓬགB t us D u t ue t⇁D vision multiple access, TDMA)、频分多址 (Fre-
图 2 节点应答定位的方案 quency division multiple access, FDMA) 和码分
Fig. 2 A network node location scheme 多址 (Code division multiple access, CDMA) 等。