
Page 53 - 应用声学2019年第4期
P. 53
第 38 卷 第 4 期 冯西安等: 水下移动平台网络化协同探测技术发展 513
0 10
ᓓΟ 5
-5 ફఝ வͯੱ࡙/(O)
ᚸՌՑ 0 0 50 100 150 200 250 300 350
-10 ஏᓓᝈ/(O)
ቇᫎ៨/dB -15 10 (a) ӭ667
-20 வͯੱ࡙/(O) 5 0
-25 0 50 100 150 200 250 300 350
ஏᓓᝈ/(O)
(b) ʼᝈی੨өՏ
-30
-80 -60 -40 -20 0 20 40 60 80 10
வͯᝈ/(O) வͯੱ࡙/(O) 5
图 4 融合前后的空间谱估计比较 0 0 50 100 150 200 250 300 350
ஏᓓᝈ/(O)
Fig. 4 Comparison of spatial spectrum estimation
(c) ʷߚی੨өՏ
before and after fusion
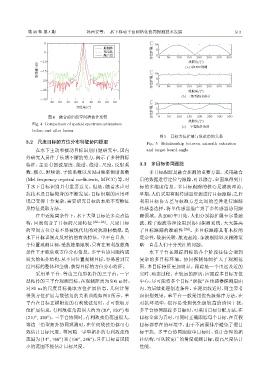
图 5 目标方位扩展与敌弦角的关系
3.2 尺度目标的方位分布特征协同提取 Fig. 5 Relationship between azimuth extension
在水下主动和被动目标识别问题研究中,国内 and target board angle
外研究人员作了长期不懈的努力,揭示了多种目标
特征,主要有回波展度、能谱、线谱、尺度、反射系 3.3 多目标协同跟踪
数、极点、时频谱、子波系数以及 Mel 频率倒谱系数 多目标跟踪是融合探测的重要方面。采用融合
(Mel frequency cepstral coefficients, MFCC)等,对 后的数据进行定位与跟踪,可以综合、全面地得到目
于水下目标识别具有重要意义。但是,随着水声对 标的多维度信息。多目标跟踪的核心是滤波理论。
抗技术及目标隐身的不断发展,目标识别的应用环 早期,人们采用有限传感器资源进行目标跟踪,之后
境已变得十分复杂,需要研究目标的本质不变特征 利用目标协方差与标准方差之间的差异进行跟踪
及特征提取方法。 传感器选择,将单传感器推广到了多传感器协同跟
在中近距离条件下,水下大型目标是多亮点结 踪领域。从 2000年开始,人们分别将扩展卡尔曼滤
构,回波包含了目标的尺度特征 [22−23] 。尺度目标 波、粒子滤波等理论用到协同探测系统,大大提高
的空间方位分布不易被现代化的对抗器材模拟,是 了目标跟踪的准确性 [24] 。多目标跟踪具有本质的
水下目标识别及反对抗的有效特征。单平台只从一 复杂性,数据关联、航迹起始、杂波剔除以及跟踪策
个位置观测目标,受敌舷角限制,只有在有利敌舷角 略一直是人们十分关注的问题。
条件下才能获取方位分布信息。多平台协同能构成 水下平台在跟踪目标的各个阶段往往会遇到
较大的拓扑结构,从不同位置观测目标,容易看到尺 复杂的多目标环境。协同探测体制扩大了观测范
度目标的整体和全貌,获得目标的方位分布特征。 围,多目标特征更加明显。跟踪是一个由远及近的
采用单平台、等边三角形拓扑的三平台、一字 实时、动态过程。在较远的距离,应跟踪多目标方位
型拓扑的三平台观测目标,在观测距离为500 m 时, 中心,尽可能将多个目标 “聚拢” 在传感器探测扇面
对 80 m 的尺度目标提取方位扩展信息,几何计算 内,为后续处理创造条件。在距离较近时,则主要考
得到方位扩展与敌弦角的关系曲线如图 5 所示。单 虑识别效果。单平台一般采用优先级排序方法,在
平台在目标正横附近的有利敌弦角时,才可获取方 对抗环境中,很容易受到优先级较高的诱饵干扰。
位扩展信息,有利敌弦角范围大约为 (30 , 150 ) 和 多平台协同跟踪多目标时,可采用目标分配方法,在
◦
◦
(210 , 330 )。三平台协同时,有利敌弦角范围很大, 目标全部为真时,可同时正确跟踪每个目标,在真假
◦
◦
等边三角型拓扑协同观测时,在任何敌弦角都可有 目标都存在的环境中,由于不需要排序避免了假目
效估计目标尺度。等间隔一字型拓扑的有利敌弦角 标干扰。多平台协同跟踪单目标时,设计合理的拓
范围为(14 , 166 )和(196 , 346 ),只在目标首尾较 扑结构,可从较宽广的角度观测目标,提高尺度估计
◦
◦
◦
◦
小的范围不能估计目标尺度。 性能。