
Page 52 - 应用声学2019年第4期
P. 52
512 2019 年 7 月
TDMA 和 FDMA 的资源利用率不高,在分配好 载波系统普遍存在子载波深度衰落问题,因此,可基
的时隙或频谱中,一个用户未使用的子载波不能 于信道特性进行子载波的自适应资源优化。自适应
给其他用户使用,而是白白浪费。CDMA 用户都占 OFDMA己成为一个重要的研究方向 [15−16] 。
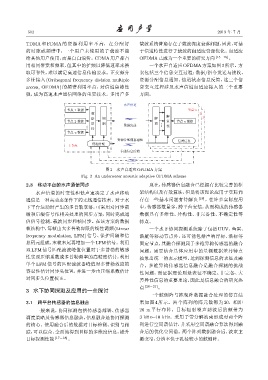
用相同带宽和频率,但其中的扩频以降低速率来换 一个水声自适应 OFDMA 方案如图 3 所示。方
取可靠性,难以满足高速信息传输要求。正交频分 案包括三个信息交互过程:数据/指令发送与接收、
多址接入 (Orthogonal frequency division multiple 资源分配信息通知、信道状态信息反馈,这三个信
access, OFDMA) 的频谱利用率高,对信道鲁棒性 息交互过程涉及水声信道自适应接入的三个重要
强,成为高速水声通信网络的重要技术。多用户多 方面。
≤༠ؑ䚃
ᓬག ᓬག u
ូ ᝍ ᝍ
ᓬག ܭ ᓬག u
ܭ ҄ ូ
ԧ ଌ
ଌ
ᓬག u
ᠫູѬᦡηৌᤰᅼ η᥋ηৌ
ᠫູѬᦡ
˟ᓬག
η᥋ηৌԦᯠ
图 3 水声自适应 OFDMA 方案
Fig. 3 An underwater acoustic adaptive OFDMA scheme
2.3 移动平台的水声通信同步 现在,传感器信息融合已经拥有比较完善的框
水声信道的时变性和低声速决定了水声移动 架结构以及有效算法,但是将该理论应用于实际尚
通信是一种高动态条件下的无线通信技术。对于水 存在一些基本问题有待解决 [19] 。在许多实际应用
下平台运动时产生的多普勒衰落,可采用对同步前 中,传感器数量多、跨平台安装,从而构成的传感器
缀和后缀信号作相关处理的同步方案,同时完成通 数据具有多维性、异构性、非完备性、不确定性等
信信号检测、载波同步和帧同步。在该方案的数据 特点。
帧结构中,每帧由大多普勒容限的线性调频(Linear 一个水下协同探测系统除了包括 UUV、鱼雷、
frequency modulation, LFM) 信号、保护间隔和信 潜艇等移动节点外,还可能包括声呐浮标、潜标等
息码元组成,末帧末尾再增加一个 LFM信号。利用 固定节点,其融合探测属于多维异构传感器的融合
双 LFM 信号匹配滤波峰值位置对于多普勒的敏感 问题。需要结合具体应用中的量测数据差异特点
性实现压缩系数或多普勒频率的高精度估计,利用 抽象出统一的表示模型,达到探测信息的表征及融
单个 LFM 信号的匹配滤波器峰值对多普勒效应的 合。多维异构传感器信息融合是融合探测的挑战
容忍性估计同步头位置,并进一步由压缩系数估计 性问题,而证据理论则是表征不确定、非完备、大
对同步头位置校正。 差异性信息的重要理论,因此是信息融合的研究热
点 [20−21] 。
3 水下协同探测及应用的一些探讨
一个舷侧阵与拖曳阵数据融合处理的仿真结
3.1 跨平台传感器的信息融合 果如图 4 所示。两个阵列的阵元数都为 20,相距
一般来说,协同探测包括传感器部署、传感器 20 m 平行布阵。目标辐射噪声滤波后的频带为
调度策略及传感器信息融合,信息融合是协同探测 3 kHz∼10 kHz。采用子带分解波束形成对两个阵
的核心。使用融合后的数据对目标检测、识别与跟 列进行空间谱估计,并采用空间谱融合算法得到融
踪,可以综合、全面地得到目标的多维度信息,提升 合后的优化空间谱。两个阵列数据融合后,波束主
目标探测性能 [17−18] 。 瓣变窄,分辨率优于孔径较小的舷侧阵。