
Page 42 - 《应用声学》2020年第4期
P. 42
528 2020 年 7 月
1 近场聚焦逆波束形成的噪声抵消原理
0 引言 和方法
近年来,水下航行器 (Underwater unmanned
1.1 舷侧阵阵元处平台尾部自噪声逆波束形成抵
vehicle, UUV) 在各国海洋设备中占有了举足轻重 消方法
的地位,在海洋环境监测、资源开发、海上救援以及
UUV 平台舷侧阵列接收到来自远场的目标信
海底搜索等方面有着广泛而深入的应用 [1] 。在阵列
号和平台自噪声及海洋环境噪声的干扰,阵元接收
信号处理中,当目标信号弱而干扰噪声强时,目标通
信号的信噪比很低,特别是平台尾部自噪声的多途
常会被干扰掩盖,不利于微弱信号目标的检测和方
干扰,严重影响 UUV 的目标探测能力,如何有效抑
位估计。UUV 是个高噪声平台,近场干扰严重,影
制各阵元处平台尾部自噪声干扰,成为提高 UUV
响其工作性能 [2] 。由于自噪声干扰强度大,舷侧阵
舷侧阵声呐探测距离的一个关键问题。为此,在分
阵元接收信号的信干比低,导致舷侧阵对目标的探
析阵列接收目标信号和来自尾部的多途自噪声干
测距离大大缩短,削弱了UUV的目标探测能力。
扰模型,以及分析平台参数和平台运动参数影响尾
在 UUV 平台噪声干扰抵消中,文献 [3] 采用最
部自噪声干扰的基础上,提出一种采用近场聚焦逆
小均方(Least mean square, LMS)自适应滤波器对
波束形成的 UUV 平台噪声自适应抵消方法,以达
机械振动噪声进行干扰抵消;文献 [4] 以阵列多通
到实时有效抑制尾部自噪声干扰的目的。近场聚焦
道差分方法提供相关参考噪声为前提,利用基于核
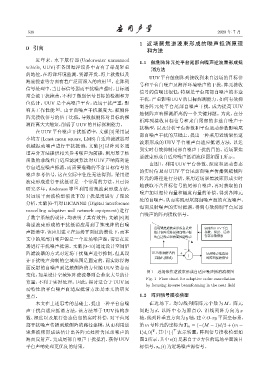
逆波束形成自适应噪声抵消流程图如图1所示。
函数的非线性自适应滤波算法对 UUV 声呐阵列进
由图 1,利用 UUV 平台参数、深度和运动姿态
行自适应噪声抵消,而需要准确的不含目标信号的
的实时信息对 UUV 平台尾部自噪声传播到舷侧阵
噪声参考信号,这在实际中往往无法得到。采用逆
阵元的路径进行分析,采用近场聚焦波束形成实时
波束形成进行干扰抵消是一个常用的方法,且已经
地获取不含目标信号的尾部自噪声,再对获取的自
研究多年;Anderson 等 [5] 利用常规波束形成方法,
噪声加以相位向量和幅度向量的补偿,得到各阵元
对远场平面波模型假设下的干扰抵消进行了理论
处的自噪声,从而实现对尾部自噪声源的直达噪声、
分析,文献[6–7] 对DICANNE (Digital interference
海面反射噪声的实时抵消,得到有效抑制平台尾部
cancelling adaptive null network equipment) 进行
自噪声的阵列接收信号。
了数字系统的设计,均表明了其有效性;文献 [8] 则
将逆波束形成的干扰抵消应用到了拖曳阵的自噪
ᤃڤᐑཥᤤฉౌॎੇᒭᤠऄ ࠄᄊUUVࣱԼ
声抵消中,该应用建立在远场平面波的假设下,而本 ͥᝠՊЋܫࡋᦊᒭ٪ܦູ Ԡnjງएnjᤂү
文中的尾部自噪声源是一个近场噪声源,需要在近 ᄊᄰ٪ܦ֗๒᭧Ԧ࠱٪ܦ ގগԠηৌ
场进行干扰噪声抵消。文献 [9–10] 通过设计空间矩
-
阵滤波器的方式对近场干扰噪声进行抑制,但其设 UUVᓓΟՊ + ࡋᦊ٪ܦખ๗Ց
Ћᣥѣ(ᮠ۫) ᄊѵଌஆηՂ
计干扰噪声抑制的空域范围是固定的,而实际经海
面反射的自噪声到达舷侧阵的方位随 UUV 姿态而
图 1 近场聚焦逆波束形成自适应噪声抵消流程图
变化,如果设计空域矩阵滤波器则会带来大量的计
Fig. 1 Flow chart for adaptive noise cancellation
算量,不利于实时处理。因此,探讨适合于 UUV 运
by focusing inverse beamforming in the near field
动特性的平台噪声自适应抵消方法是本文的研究
重点。 1.2 阵列信号接收模型
本文在上述思考的基础上,提出一种平台自噪 在近场下,均匀线列阵阵元个数为 M,阵元
声干扰自适应抵消方法,该方法基于 UUV 结构参 间距为 d,以阵中心为原点 O,沿线列阵方向为 x
数、深度以及航行姿态信息的实时补偿,对平台尾 轴,线列阵垂直方向为 y 轴,建立 O-xy 平面坐标系,
部干扰噪声传播到舷侧阵的路径建模,从而利用逆 第m 号阵元的坐标为 T m = (−(M − 1)d/2 + (m −
T
T
聚焦波束形成法估计出各阵元处所含尾部噪声的 1)d, 0) ,其中 (·) 表示转置,阵列信号接收模型如
海面反射声,完成尾部自噪声干扰抵消,获得 UUV 图2所示,其中s(t)是来自于θ 方位的远场平面波目
平台声呐处理更优良的结果。 标信号,s n (t)为近场噪声源信号。