
Page 47 - 《应用声学》2020年第4期
P. 47
第 39 卷 第 4 期 宁江波等: 近场聚焦逆波束形成的 UUV 平台噪声自适应抵消 533
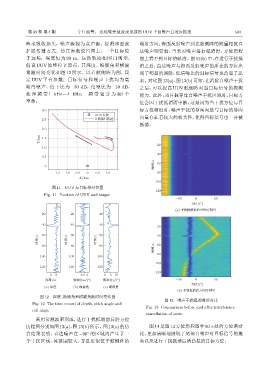
海水吸收损失,噪声源视为点声源,按照球面波 端射方向;海面反射噪声到达舷侧阵的能量相比直
扩展传播方式。仿真参数设置同上,一个目标位 达噪声则要弱,当未对噪声进行抵消时,方位历程
于远场,深度恒为 20 m,运动轨迹如图 11 所示, 图上看不到目标的轨迹。图13(b)中,在进行干扰抵
假设 UUV 始终位于原点,其深度、纵倾角和横滚 消之后,直达噪声与海面反射噪声的所在的方位出
角随时间变化如图 12 所示。以右舷侧阵为例,设 现了明显的消除,低信噪比的目标信号也凸显了出
定 UUV 平台参数;目标信号和噪声干扰均为高 来。对比图13(a)、图13(b)可知,在消除自噪声干扰
斯白噪声,信干比为 −30 dB,信噪比为 −10 dB, 之后,可以提高 UUV 舷侧阵对弱目标信号的探测
处 理 频 带 1 kHz ∼ 4 kHz, 频 带 划 分 为 301 个 能力。此外,当目标穿过自噪声干扰区域时,目标方
窄带。 位会因干扰抵消而中断,这是因为当干扰方位与目
3.0 标方位相近时,噪声干扰的导向向量与目标的导向
UUVͯᎶ 向量存在着较大的相关性,使得目标信号也一并被
2.5 ᄬಖᓈᛡᢾᤜ
抵消。
2.0
Y/km 1.5
20
1.0
40
0.5
ᫎ/s 60
0
-1.5 -1.0 -0.5 0 0.5 1.0 80
X/km
100
图 11 UUV 与目标相对位置
120
Fig. 11 Position of UUV and target
-50 0 50
வͯ/(°)
(a) ࣰખ๗Ғᄊவͯԋሮڏ
20 20 20
40 40 40
20
ᰦ䰤/s 60 ᰦ䰤/s 60 ᰦ䰤/s 60 40
ᫎ/s
80 80 80 60
80
100 100 100
100
120 120 120
120
6 8 -2 0 2 0 5 10
␡ᓖ/m 㓥ٮ䀂α/(°) ⁚┊䀂γ/(°) -50 0 50
வͯ/(°)
(a) ງए (b) ጫϚᝈ (c) ഷ໔ᝈ
(b) ࣰખ๗Ցவͯԋሮڏ
图 12 深度、纵倾角和横滚角随时间变化图
图 13 噪声干扰抵消前后对比
Fig. 12 The time record of depth, pitch angle and
Fig. 13 Comparison before and after interference
roll angle
cancellation of noise
采用常规波束形成,进行干扰抵消前后的方位
历程图分别如图 13(a)、图13(b)所示。图13(a)的仿 图 14 是图 13 方位历程图中 80 s 处的方位谱对
真结果表明,直达噪声在 −90 的区域内产生了一 比,更加清晰地展现了尾部自噪声对目标信号的掩
◦
个干扰区域,其范围较大,并且近似位于舷侧阵的 盖以及进行干扰抵消后所凸显的目标方位。