
Page 49 - 《应用声学》2020年第4期
P. 49
第 39 卷 第 4 期 宁江波等: 近场聚焦逆波束形成的 UUV 平台噪声自适应抵消 535
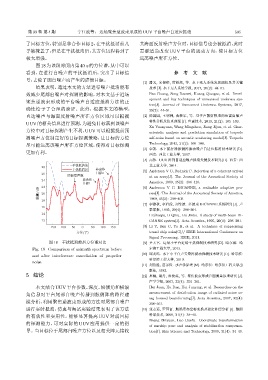
了目标方位,特别是非合作目标 2,在干扰抵消前几 其海面反射噪声方位时,目标信号也会被抵消,此时
乎被掩盖了,但是在干扰抵消后,其方位历程得到了 需要适当改变 UUV 平台的运动方向,使目标方位
极大增强。 远离噪声所在方位。
图18为该段时间内第 40 s的方位谱,从中可以
看到,在进行自噪声的干扰抵消后,突出了目标信 参 考 文 献
号,去除了因自噪声而产生的虚假目标。
[1] 潘光, 宋保维, 黄桥高, 等. 水下无人系统发展现状及其关键
结果表明,通过本文的方法进行噪声抵消能有 技术 [J]. 水下无人系统学报, 2017, 25(2): 44–51.
效减少尾部自噪声对探测的影响,对本文基于近场 Pan Guang, Song Baowei, Huang Qiaogao, et al. Devel-
opment and key techniques of unmanned undersea sys-
聚焦逆波束形成的平台噪声自适应抵消方法的正
tem[J]. Journal of Unmanned Undersea Systems, 2017,
确性给予了合理的验证。此外,根据本文的模型, 25(2): 44–51.
直达噪声与海面反射噪声所在方位区域可以根据 [2] 徐园园, 王明洲, 蒋继军, 等. 基于声散射模型的鱼雷自噪声
UUV的相关信息进行预测,为避免目标落到该噪声 特性分析及仿真预报 [J]. 鱼雷技术, 2013, 21(2): 105–109.
Xu Yuanyuan, Wang Mingzhou, Jiang Jijun, et al. Char-
方位中对目标探测产生不利,UUV可以根据提前预 acteristic analysis and prediction simulation of torpedo
测噪声方位制定好的目标探测策略,让目标的方位 self-noise based on acoustic scattering model[J]. Torpedo
尽可能远离该噪声所在方位区域,使得对目标探测 Technology, 2013, 21(2): 105–109.
[3] 李凯. 水下航行器舷侧阵振动噪声自适应抵消技术研究 [D].
更加有利。
西安: 西北工业大学, 2007.
[4] 高伟. UUV 阵列自适应噪声抵消关键技术研究 [D]. 西安: 西
ࣰખ๗Ғ 北工业大学, 2014.
28
ࣰખ๗Ց ᭤Ռͻ [5] Anderson V C, Rudnick P. Rejection of a coherent arrival
26 ᄬಖ2
ฉ܁ܦູ at an array[J]. The Journal of the Acoustical Society of
24 ᭤Ռͻ
ᄬಖ1 America, 1969, 45(2): 406–410.
22 [6] Anderson V C. DICANNE, a realizable adaptive pro-
ᑟ᧚/dB 20 cess[J]. The Journal of the Acoustical Society of America,
18 1969, 45(2): 398–405.
[7] 李淑秋, 李启虎, 刘金波. 多波束 DICANNE 系统研究 [J]. 声
16
学学报, 1995, 20(4): 298–301.
14
Li Shuqiu, Li Qihu, Liu Jinbo. A study of multi-beam DI-
12 CANNE system[J]. Acta Acustica, 1995, 20(4): 298–301.
-150 -100 -50 0 50 100 150 [8] Li Y, Sun C, Yu H, et al. A technique of suppressing
வͯ/(°) towed ship noise[C]// IEEE International Conference on
Signal Processing. IEEE, 2011.
图 18 干扰抵消前后方位谱对比 [9] 尹天宫. 运动小平台近场干扰抑制技术研究 [D]. 哈尔滨: 哈
Fig. 18 Comparison of azimuth spectrum before 尔滨工程大学, 2013.
and after interference cancellation of propeller [10] 邱龙皓. 水下小平台声矢量阵被动探测技术研究 [D]. 哈尔滨:
哈尔滨工程大学, 2019.
noise
[11] 刘伯胜, 雷家煜. 水声学原理 [M]. 哈尔滨: 哈尔滨工程大学出
版社, 1993.
5 结论 [12] 惠娟, 胡丹, 惠俊英, 等. 聚焦波束形成声图测量原理研究 [J].
声学学报, 2007, 32(4): 356–361.
本文结合 UUV 平台参数、深度、纵倾角和横滚 Hui Juan, Hu Dan, Hui Junying, et al. Researches on the
角信息对平台尾部自噪声传播到舷侧阵的路径建 measurement of distribution image of radiated noise us-
ing focused beamforming[J]. Acta Acustica, 2007, 32(4):
模分析,利用聚焦逆波束形成的方法对尾部自噪声 356–361.
进行实时抵消,仿真与海试实验结果表明了该方法 [13] 张志远, 罗国富. 舰船姿态坐标变换及稳定补偿分析 [J]. 舰船
的有效性和实用性,能够显著提高 UUV 对弱目标 科学技术, 2009, 31(4): 34–40.
Zhang Zhiyuan, Luo Guofu. Coordinate transformation
的探测能力,可对实际的 UUV 应用提供一定的指
of warship pose and analysis of stabilization compensa-
导。当目标位于尾部自噪声方位以及相关阵元接收 tion[J]. Ship Science and Technology, 2009, 31(4): 34–40.