
Page 48 - 《应用声学》2020年第4期
P. 48
534 2020 年 7 月
35
ࣰખ๗Ғ
ࣰખ๗Ց
30
50 50 50
ᑟ᧚/dB 25 ᄬಖ ᰦ䰤/s 100 ᰦ䰤/s 100 ᰦ䰤/s 100
20
150 150 150
15
10 200 200 200
-50 0 50
வͯ/(°)
10 12 0 2 4 1 2 3
图 14 噪声干扰抵消前后方位谱对比 ␡ᓖ/m 㓥ٮ䀂α/(°) ⁚┊䀂γ/(°)
Fig. 14 Azimuth spectrum comparison before and (a) ງए (b) ጫϚᝈ (c) ഷ໔ᝈ
after interference cancellation of noise
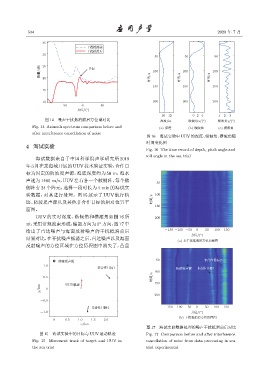
图 16 海试实验中 UUV 的深度、纵倾角、横滚角随
时间变化图
4 海试实验
Fig. 16 The time record of depth, pitch angle and
roll angle in the sea trial
海试数据来自于中国科学院声学研究所 2019
年3 月在某海域开展的 UUV技术验证实验,合作目
标为固定的防波堤声源,海底深度约为 50 m,海水
声速为 1460 m/s,UUV 左右各一个舷侧阵,每个舷
50
侧阵有 24 个阵元,选择一段时长为 4 min 的海试实
验数据,对其进行处理。图 15 展示了 UUV 航行轨 100
迹、防波堤声源以及其他非合作目标的相对位置平 ᫎ/s
150
面图。
UUV 的实时深度、纵倾角和横滚角如图 16 所 200
示,采用常规波束形成,艏部方向为0 方向,图17中
◦
给出了直达噪声与海面反射噪声的干扰抵消前后 -150 -100 -50 0 50 100 150
வͯ/(°)
结果对比,在干扰噪声抵消之后,直达噪声以及海面
(a) ᵚᒢᢠᣥ⎸Ⲵᯩսশ〻മ
反射噪声的方位区域在方位历程图中消失了,凸显
ฉ܁ܦູ 50 ᭤Ռͻᄬಖ
1.0
᭤Ռͻᄬಖ1 ฉ܁ܦູ ᭤Ռͻᄬಖ
100
0.5 ᫎ/s
y/km 0 UUVᓈᤜ 150
200
-0.5
᭤Ռͻᄬಖ2 -150 -100 -50 0 50 100 150
-1.0 வͯ/(°)
(b) ᒢᢠᣥ⎸ਾᯩսশ〻മ
0 0.5 1.0 1.5 2.0
x/km
图 17 海试实验数据处理的噪声干扰抵消前后对比
图 15 海试实验中的目标与 UUV 运动轨迹 Fig. 17 Comparison before and after interference
Fig. 15 Movement track of target and UUV in cancellation of noise from data processing in sea
the sea trial trial experimental