
Page 25 - 《应用声学》2020年第5期
P. 25
第 39 卷 第 5 期 张蒙等: 基于动态阈值匹配追踪的主动声呐直达波抑制方法 667
验条件下 DTMP 算法迭代 25 次即可有效收敛,而 2.2 海试数据处理
OMP 算法达到相近的抑制效果需要迭代 100 次左 本小节对 2018 年 4 月在南中国海进行的主动
右。由于匹配追踪类算法的计算量主要集中在互相 探测实验获得的数据进行处理,验证直达波抵消
关向量的计算上,通过每次迭代中跟踪多个向量,可 算法的有效性。实验期间,信号发射船位于观测阵
以获得计算速度的提升。 187 方位,距离约10.2 km处;合作探测目标为一水
◦
StOMP 算法在经历快速衰减之后,信号的残 面船,位于观测阵 230 方向,距离 10.8 km 处,其相
◦
余能量仍然会在每次迭代中小幅衰减,这种衰减实 对方位如图9所示。实验中采用宽带伪随机信号,信
际是降低了信号整体的能量,会造成回波信号的损 号带宽为100 Hz,脉冲持续时间为18 s,这种信号具
失。另外,由于 StOMP算法估计的信道响应是非稀 有很高的时延多普勒分辨力,但主旁瓣比为 25 dB。
疏的,大量的冗余响应会降低算法的计算速度。 实测数据中,直达波时延为 6.7 s,理论回波时延约
12.2 s,相对时延为 5.5 s,而直达波时间长度为 18 s,
这在探测中形成了较长时间的直达波覆盖。
3
־ऄࣨϙ 2 1
0 9
0.4 0.5 0.6 0.7 0.8 0.9
ण/s 10775 m
(a) OMPͥᝠፇ౧ 7
3 10248 m
־ऄࣨϙ 2 1 ᡰሏ/km 5 ᄬಖᓕ
0 3
0.4 0.5 0.6 0.7 0.8 0.9 7758 m
ण/s
ܦູᓕ
(b) DTMPͥᝠፇ౧ 1
3
1 3 5 7 9 11
־ऄࣨϙ 2 1 ᡰሏ/km
0 图 9 直达波抑制前后匹配滤波结果
0.4 0.5 0.6 0.7 0.8 0.9 Fig. 9 Working location of trail ships
ण/s
(c) StOMPͥᝠፇ౧
回波信号与直达波信号声传播损失相差约
图 7 直达波抑制前后波形对比 60 dB,由于采用的信号主旁瓣比值约为 25 dB,波
Fig. 7 Comparison diagram of channel estimation 束形成、匹配滤波后的处理增益无法弥补由声传播
results 损失引起的能量差异,需要进行直达波抑制。
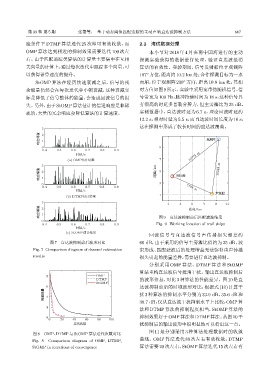
分别采用 OMP 算法、DTMP 算法和 StOMP
算法重构直达波信号抵消干扰。输出直达波抑制后
8 OMP
DTMP 的波形信息,对比 3 种算法的性能差异。图 10 是直
StOMP
6 达波抑制前后的时域波形对比,根据式 (10) 计算干
൵ࣀᑟ᧚ 4 扰 3 种算法的抑制水平分别为 33.9 dB、35.6 dB 和
38.7 dB,仅从直达波干扰抑制水平上比较,OMP算
2
法和 DTMP 算法的抑制程度相当,StOMP 算法的
0 抑制效果好于OMP算法和DTMP算法。从图10干
0 20 40 60 80 100
ᤖ̽ 扰抑制后的输出波形中很明显地可以看出这一点。
图 11 是分别采用 3 种算法处理数据时的收敛
图 8 OMP、DTMP 与 StOMP 算法迭代次数对比
Fig. 8 Comparison diagram of OMP, DTMP, 曲线。OMP 算法迭代 80 次左右有效收敛,DTMP
StOMP in iterations of convergence 算法需要 20 次左右,StOMP 算法迭代 15 次左右有