
Page 126 - 《应用声学》2021年第1期
P. 126
122 2021 年 1 月
效性,对比分析了波形参数对测距性能和模型收敛
0 引言
速度的影响。
声源被动测距作为声呐系统的重要功能之一,
一直是水声工作者密切关注的问题 [1] 。由于水声观 1 理论模型
测信号受复杂的时、空、频变及强多途、高噪声和多 1.1 水声信号多域特征提取
普勒效应等因素影响,传统的匹配场处理方法往往
声信号的多域特征可归纳为 6 类:时域波形结
面临计算量大和环境失配等问题。近年来,深度学
构特征、时域包络特征、频域谱特征、基于 STFT 的
习作为基于数据驱动方式的新兴分支,以其强大的
时频联合域特征、基于等效矩形带宽的听觉谱特征
特征提取能力和高效处理复杂、高维、非线性系统
和基于正弦谐波模型的谐波谱特征 [7] 。每一类特征
问题的独特优势 [2] ,为水声被动测距提供了一种新
均包含了对应谱的多种声音特性,这些特征属性无
思路。
法用单一尺度进行描述,只有在多维特征空间下才
深度神经网络通过大量数据样本建立高维参
能表示。 Peeters等 [8] 对这些声学特征进行总结,并
数之间的复杂非线性映射,适用于物理建模困难的
通过多维标度法提取了合适的声学参数,使之与声
问题,引发了水声研究者的关注。Lefort 等 [3] 通过
信号在每个维度上的坐标呈现较大的相关性。
水箱实验研究了机器学习算法在水声目标测距中
这些声学参数是基于不同谱表达计算的,其表
的测距性能。Niu 等 [4] 利用单水听器和残差卷积神
征的物理含义各有不同,而水下声源物理特征和声
经网络对声源进行定位。Wang等 [5] 提出了一种用
场信息主要包含在信号的时域波形、频域能量分布
于水下声源测距的深度迁移学习方法,将从仿真环
中。因此,本文综合了以上更符合水声信号特点的
境获得的预测能力迁移到实验海域。
前 4 类特征,并将所对应的特征归纳为时域特征和
水声接收信号包含声源和声信道的大量信息,
时频联合域特征。
其特征提取和构造是深度学习方法的关键环节。
1.1.1 时域特征
早期特征提取通常利用信号的自相关函数和功率
谱估计,或采用时 -频分析方法来提取一些时频联 水声信号时域波形反映了信道对声信号传播
合域特征,如短时傅里叶变换 (Short-time Fourier 的畸变作用,是获取声源总体特征最直接的来源。
transform, STFT)、Wingner-Ville分布等。然而,无 为了直接从时域提取特征,自相关系数是一种广泛
论是功率谱分析还是时频分析 [6] ,它们包含大量与 使用的分类特征。首先是对原始信号 s(t n ) 求自相
声源位置不相关的信息或冗余信息,在形式上维数 关系数,t n 代表信号时刻,保留前 N 维的自相关系
较大,一般无法直接应用于测距任务。而且,单一地 数(c ∈ {1, · · · , N})表示为 [9]
采用某类特征通常会丢失掉部分特征,缺乏全面性。 1 L n −c−1
∑
ρ(c) = s(t n )s(t n+c ), (1)
针对以上问题,本文设计了一种基于多域特征 ρ(0)
n=0
提取和深度学习的方法来实现声源被动测距。首
其中,L n 是分帧时的窗长,c 代表时间的滞后量。
先从声信号中提取多域特征,包含时域波形结构特
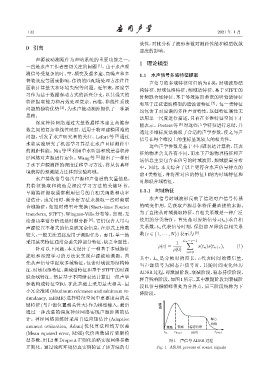
当声源信号为瞬态声信号时,其随时间变化经历
征、时域包络特征、频域谱特征和基于STFT的时频
ADSR过程,即激励阶段、衰减阶段、稳态持续阶段、
联合域特征。然后基于不同谱表达计算出一组声学
释音残响阶段,如图 1 所示,其中激励阶段到衰减阶
参数构成特征空间,在此基础上采用最大相关 - 最
段以信号振幅峰值处为分界点,后三阶段统称为下
小冗余准则(Maximum relevance and minimum re-
降阶段。
dundancy, mRMR) 选择特征空间中重要度高的关
键特征 (与声源位置相关性大) 作为模型输入,最后 ࣨ
通过一种改进的深度神经网络实现声源距离的估
计。神经网络训练时采用自适应矩估计 (Adaptive ᧖ᮃ
൵־
moment estimation, Adam) 优化算法和均方误差 ༏ҵ ᛰѓ ሷগે፞
(Mean squared error, MSE) 代价函数进行更新模 t st t Aend ᫎ t Dend
型参数,用L2和Dropout 正则化策略实现网络参数 图 1 声信号 ADSR 过程
正则化。通过浅海环境仿真实例验证了该方法的有 Fig. 1 ASDR process of sound signals