
Page 144 - 《应用声学》2021年第2期
P. 144
312 2021 年 3 月
最后进行信息净化处理,其公式可表示为 时较长。图10 是基于形态滤波估计的干扰背景,可
X l 以看出估计的背景与原始图像基本一致;信息净化
Y l = , (12)
b 处理结果如图 11所示,经本文方法处理后图像比较
X l
b
其中,X l 为原始图像中对应波束号上的输出值,X l “干净”,仅剩下点状目标,与原始图像相比,点目标
为估计的背景值,Y l 为图像净化后的输出值。 显示更加清新,整个背景被拉平,本船干扰和混响
被基本消除,主动声呐目标探测画面得到明显改善。
300
దᄬಖ 而且,运行时间分析显示,加权二维均值法运行时间
ᄬಖ
250
为 11.2268 s,而本文方法运行时间仅需要 0.2497 s,
运算效率高。
200
ᄱࠫࣨϙ 150 1100
1000
100
900 ᄬಖ
800
50
700
ᡰሏག 600
0
100 300 500 700 900 1100 500
ᡰሏག 400
300
图 6 有无目标时单波束波形
200
Fig. 6 Single beam waveform with or without target 100
-150 -100 -50 0 50 100 150
0.10
வͯᝈए/(O)
దᄬಖ
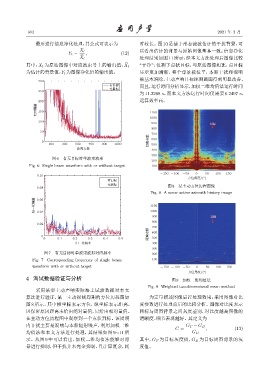
ᄬಖ 某主动方位历程图像
0.08 图 8
Fig. 8 A sonar active azimuth history image
ॆʷӑࣨϙ 0.06 1100
1000
0.04
900 ᄬಖ
800
0.02
700
ᡰሏག 600
0
0 0.1 0.2 0.3 0.4 0.5 500
ॆʷӑᮠဋ 400
300
图 7 有无目标时单波束波形对应频率 200
Fig. 7 Corresponding frequency of single beam 100
waveform with or without target -150 -100 -50 0 50 100 150
வͯᝈए/(O)
4 海试数据验证与分析 图 9 加权二维均值法
Fig. 9 Weighted two-dimensional mean method
采用某型主动声呐实际海上试验数据对本文
算法进行验证,某一主动探测周期的方位历程图如 为定量描述图像后置处理效果,采用图像对比
图 8 所示,其中横坐标表示方位,纵坐标表示距离, 度参数进行处理前后的比较分析。图像对比度表示
因保密原因距离未给出绝对量值,只给出相对量值。 目标与周围背景之间灰度差别,对比度越高图像的
在主动方位历程图中观察到一个点状目标。该周期 清晰度、细节表现越好。其定义为
内干扰主要是混响与本船辐射噪声,利用加权二维 G T − G B
C = , (13)
均值法和本文方法进行处理,其结果如图 9∼11 所 G B
示。从图 9 中可以看出,加权二维均值法能够对背 其中,G T 为目标灰度值,G B 为目标周围背景的灰
景进行抑制,但干扰并未完全抑制,且计算复杂,耗 度值。