
Page 149 - 《应用声学》2021年第2期
P. 149
第 40 卷 第 2 期 王超等: 单矢量水听器直方图测向算法目标探测性能分析 317
式 (1) 中,θ(f) 表示不同频率 f 计算得到的目标方
0 引言
位,P w 、V xw 和 V yw 分别表示矢量水听器声压 P、x
方向振速通道和 y 方向振速通道采集信号频谱值,
矢量水听器矢量通道具有与频率无关的偶极
子指向性,同时具有抗各向同性噪声干扰的能力,单 I x 和I y 则分别表示x方向和y 方向声能流。由式 (1)
可以看出,通过式(1)计算出的目标方位与频率f 有
个矢量水听器即可实现全空间无模糊定向,这为解
决水下小平台搭载声学传感器进行目标探测提供 关,不同频点处的目标方位估计值不一样,通过直方
了空间上的优势。近年来,随着矢量水听器工艺技 图估计目标方位的方法可以将环境中存在的窄带
术的不断提高,矢量信号处理技术也在强大的应用 干扰和强线谱干扰抑制,但当环境中存在多目标且
需求推动下得到了快速发展,与常规声压水听器相 辐射噪声频率相互重叠的情况下,直方图方法则无
比,矢量水听器提供了更加全面的声场信息量,其不 法得到各目标的真实方位,只能获得各目标声能流
仅可以测量声场标量,还可以得到声场的矢量特征, 的合成方位,此合成方位会偏向强度较大的目标方
极大地拓宽了信号处理的空间 [1−9] 。 位。直方图方位统计是将目标估计方位θ(f)按频点
◦
基于单矢量水听器的目标方位估计算法有很 数统计在相对应的各个方位区间里,如果按1 划分
多 [10] ,但总体上可以根据测向原理分为两大类:一 方位区间,则有 [1]
是基于声能流的方位估计;二是将矢量水听器的各 k = [θ(f) × 180/π], φ(k) = φ(k) + 1, (2)
通道看作是多元阵列,各阵元在空间近似位于同一
式(2) 中,[ ] 表示取整运算,k 为θ(f) 取整得到的值,
位置点,利用单矢量水听器自身具有阵列流型的特
如θ(f) 6 0,则θ(f) = θ(f)+360 ,使目标估计方位
◦
点,将现有的阵列信号处理方法应用于单矢量水听
落在区间 [0 ◦ 360 ) 上,φ为方位估计在各个角度处
◦
器。矢量水听器各种目标测向算法各有优缺点,其
的频数,其最大值对应的角度值即为目标估计方位。
中直方图算法较其他算法具有良好的鲁棒性和目
标方位估计性能,并具有抑制窄带和强线谱干扰的 1.2 一种目标自主探测跟踪算法
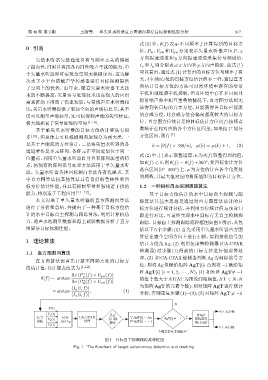
能力,特别适于工程应用 [11−12] 。 基于目标方位估计的水中目标自主探测与跟
本文对基于单矢量水听器的直方图测向算法 踪算法其基本思想是通过对直方图算法估计的目
进行了分析和总结,并提出了一种基于目标方位估 标方位进行统计分析,并利用方位统计值与预设门
计的水中目标自主探测与跟踪算法,利用计算机仿 限进行对比,可最终实现水中目标有无自主检测和
真、消声水池测量数据和海上试验数据分析了直方 跟踪。目标自主探测跟踪流程框图如图1所示,其包
图算法目标探测性能。 括以下5个步骤:(1) 首先采用单矢量水听器直方图
算法在整个空间方向上进行扫描,得到接收信号的
1 理论算法
估计方位角 Ag;(2) 利用恒虚警检测器 (CA-CFAR
检测器) 对步骤 (1) 得到的目标方位进行恒虚警处
1.1 直方图测向算法
理;(3) 如 CA-CFAR 检测器判断 Ag 为目标信号方
直方图算法需首先计算不同频点处的目标方
位,则将 Ag 值赋给矩阵 AgT[i],否则将 −1 赋给矩
位估计值,其计算表达式为 [1,12]
阵 AgT[i] (i = 1, 2, · · · , N);(4) 如矩阵 AgT̸= −1
∗
Re ⟨P (f) × V yw (f)⟩
w
θ(f) = arctan 的值个数大于AT(AT为预设门限阈值,AT < N,N
∗
Re ⟨P (f) × V xw (f)⟩
w
为矩阵AgT的元素个数),则对矩阵AgT进行统计
⟨I y (i, f)⟩
= arctan , (1)
⟨I x (i, f)⟩ 分析,否则重复步骤(1)∼(3);(5)对矩阵AgT ̸= −1
N
P↼t↽
H0 ᄬಖ
V x↼t↽ ௧ա ࠫAgT
ηՂ ͥᝠ CA-CFAR ˞ᄬಖ Y:AgT[i]=Ag AgT[i]ķ-1 Y ᅾᤉᛡ
ଌஆ V y ↼t↽ வͯAg ܫေ ηՂ N:AgT[i]=-1 ፒᝠѬౢ
V z↼t↽
H1 దᄬಖ
˔௧աܸ̆ϙAT
图 1 目标自主探测跟踪流程框图
Fig. 1 The flowchart of target autonomous detection and tracking