
Page 150 - 《应用声学》2021年第2期
P. 150
318 2021 年 3 月
的值剔除野值后计算均方根误差 StdAT,如 StdAT 次计算过程数据长度为5 s,时间窗内按75%数据重
小于阈值StdDT 则判断有目标存在,并对目标方位 叠率细分为长度为 1 s 的 17 段数据,并对每段数据
进行跟踪,否则重复步骤 (1) ∼ (4)。通过以上 5 个 进行 32768 点快速傅里叶变换 (Fast Fourier trans-
步骤即可实现对水中目标的自主探测与跟踪。 form, FFT) 计算,处理频段为 200 Hz ∼ 3 kHz,求
图 1 中,CA-CFAR 处理的原理是对某一方位 得 17 组声强谱并求平均后采用直方图算法进行目
目标进行检测与跟踪时,由于海洋环境的非平稳 标方位估计。图 3 为使用以上仿真条件直方图算法
性,导致在某一检测概率附近时,虚警概率不稳 方位估计结果随信噪比变化 (即归一化方位谱随信
定,而通过实时跟踪环境噪声的水平以设定时变门 噪比变化,方位谱为不同方位上的幅值),每个信噪
限,即可达到对该方位目标虚警概率恒定的检测效 比条件下进行 200 次蒙特卡罗独立仿真实验,可以
果。一般情况下阈值是检测概率和虚警概率的函 看出,估计方位历程随信噪比增大而渐渐清晰。为
数,CA-CFAR 处理技术是在自动检测系统中提供 定量描述直方图算法目标方位估计性能,图4和图 5
检测阈值,并且使噪声和干扰对检测系统虚警概率 分别给出了测向误差和 −3 dB 方位谱宽度随信噪
影响最小化的一种信号处理算法。在 CA-CFAR 处 比变化曲线,可以看出,当信噪比为 −7 dB 时,测向
理技术中,当特定单元需要检测时,被检测的单元称 误差约为8 ,−3 dB 方位谱宽度约为 19 ;而当信噪
◦
◦
之为测试单元 (Cell under test, CUT),测试单元周 比大于0 dB时,测向误差和−3 dB方位谱宽度则分
围用于提取噪声功率的样本单元称之为参考单元 别小于3 和7 。
◦
◦
(Reference cells, RC)。为避免目标信号泄漏到参考
16
单元中,从而对噪声功率估计产生不利影响,在参考
单元与测试单元之间要保留一部分样本作为保护 10
单元(Guard cells, GC)。图2给出了测试单元、参考 4
单元和保护单元之间的关系。 η٪උ/dB -2
តӭЋ
-8
-14
ԠᏦ ԠᏦ
ӭЋ ӭЋ -20
0 90 180 270 360
வͯᝈ/(°)
δઐӭЋ 图 3 仿真信号估计方位随信噪比变化历程图
图 2 CA-CFAR 处理示意图 Fig. 3 Bearing recording of simulated signal esti-
Fig. 2 The diagram of CA-CFAR processing mated azimuth with SNR
120
2 目标探测性能分析
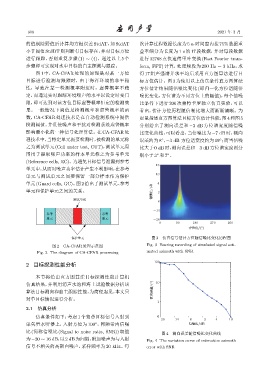
本节将给出直方图算法目标探测性能计算机
仿真结果,并利用消声水池和海上试验数据分析该 10
算法目标测向和自主跟踪性能,为简便起见,本文只 Քឨࣀ/(°)
对单目标情况进行分析。
1
2.1 仿真分析
仿真条件如下:考虑 1 个宽带目标信号入射到 0
-20 -14 -8 -2 4 10
单矢量水听器上,入射方位为 100 ,同频带内信噪 η٪උ/dB
◦
比 (简称信噪比 (Signal to noise ratio, SNR)) 取值 图 4 测向误差随信噪比变化曲线
为−20 ∼ 16 dB,以2 dB为间隔,附加噪声为与入射 Fig. 4 The variation curve of estimation azimuth
信号不相关的高斯白噪声,采样频率为 20 kHz。每 error with SNR