
Page 151 - 《应用声学》2021年第2期
P. 151
第 40 卷 第 2 期 王超等: 单矢量水听器直方图测向算法目标探测性能分析 319
120 器各通道接收信号信噪比。表 1 给出了矢量水听器
各通道接收声源信号宽带平均信噪比结果,并给
出了不同声源发射强度下各通道信噪比平均值,可
ฉౌࠕए/(°) 10 以看出,信号源输出峰峰值分别为 10 mV、20mV、
25 mV、50 mV、100 mV、1 V和10 V时,矢量水听器
接收到的声源信号宽带平均信噪比分别为−13 dB、
−7 dB、−5 dB、1 dB、7 dB、27 dB和47 dB。
1 表 1 矢量水听器接收声源信号宽带平均信噪比结果
-20 -14 -8 -2 4 10 16
η٪උ/dB Table 1 The wideband average SNR of vector
hydrophone receiving source signal
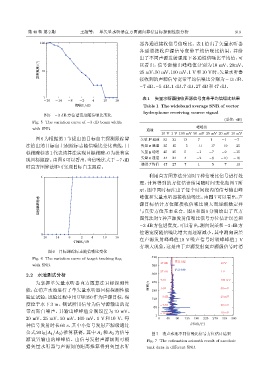
图 5 −3 dB 方位谱宽度随信噪比变化
(单位: dB)
Fig. 5 The variation curve of −3 dB beam width
with SNR 通道 峰峰值
10 V 1 V 100 mV 50 mV 25 mV 20 mV 10 mV
图 6 为根据第 1 节提出的目标自主探测跟踪算 矢量 P 通道 53 33 13 7 1 −1 −7
法给出的目标自主跟踪标志随信噪比变化曲线,目 矢量 x 通道 35 15 −5 −11 −17 −19 −25
标跟踪标志1代表该算法实现目标跟踪,0为没有实 矢量 y 通道 45 25 5 −1 −7 −9 −15
现目标跟踪。由图6可以看出,当信噪比大于−7 dB 矢量 z 通道 44 24 4 −2 −8 −10 −16
通道平均值 47 27 7 1 −5 −7 −13
时直方图算法即可实现目标自主跟踪。
利用直方图算法分别对7 种信噪比信号进行处
1
理,计算得到的方位估计结果随时间变化如图 7 所
示,图中同时标注出了每个时间段内的信号输出峰
峰值和矢量水听器接收信噪比。由图7可以看出,声
ᄬಖᡲᢎಖঃ 源目标估计方位随接收信噪比增大而逐渐稳定并
与真实方位基本重合。图 8 和图 9 分别给出了直方
图算法对 7 种声源发射信噪比信号方位估计误差和
−3 dB方位谱宽度,可以看出,测向误差和−3 dB方
位谱宽度随信噪比增大而逐渐减小,其中测向误差
0
-20 -14 -8 -2 4 10 16 在声源发射峰峰值 10 V 噪声信号时较峰峰值 1 V
η٪උ/dB
有增大现象,这是由于声源发射高声源级信号时消
图 6 目标跟踪标志随信噪比变化
Fig. 6 The variation curve of target tracking flag 420
ᄾࠄவͯ
with SNR 360 47 dB 10 V
ͥᝠவͯ
27 dB 1 V
2.2 水池测试分析 300
7 dB 100 mV
为掌握单矢量水听器直方图算法目标探测性 ᫎ/s 240
能,在消声水池进行了单矢量水听器目标探测性能 180 1 dB 50 mV
验证试验,试验过程中用 UW350 作为声源目标,深 120 -5 dB 25 mV
度位于水下 3 m。测试所用信号为信号源输出的宽 -7 dB 20 mV
60
带高斯白噪声,其输出峰峰值分别设置为 10 mV、 -13 dB 10 mV
1
20 mV、25 mV、50 mV、100 mV、1 V 和 10 V,每 0 45 90 135 180 225 270 315 360
种信号发射时长 60 s,其中小信号发射声源级通过 வͯᝈ/(°)
公式 20 lg(A 1 /A 2 ) 推算获得,其中 A 1 和 A 2 为信号 图 7 消声水池不同信噪比信号方位估计结果
源设置输出的峰峰值。由信号发射声源级则可根 Fig. 7 The estimation azimuth result of anechoic
据矢量水听器与声源间的距离推算得到矢量水听 tank data in different SNR