
Page 152 - 《应用声学》2021年第2期
P. 152
320 2021 年 3 月
20 声水池在低频段消声不完全而存在较强界面反射;
10 mV 20 mV 25 mV 50 mV 100 mV 1 V 10 V
当信噪比为 −7 dB 时,测向误差约为 8 ,−3 dB 方
◦
15 位谱宽度约为 23 ;而当信噪比大于 1 dB 时,测向
◦
Քឨࣀ/(°) 10 误差和−3 dB方位谱宽度则分别小于4 和19 。
◦
◦
图 10 为根据目标自主探测跟踪算法计算的目
出,当信噪比为 −7 dB 时,直方图算法即可实现对
5 标跟踪标志随声源发射信号强度变化曲线,可以看
声源目标自主跟踪。
-13 dB -7 dB -5 dB 1 dB 7 dB 27 dB 47 dB
0 2.3 海上试验分析
0 1 60 120 180 240 300 360
ᫎ/s
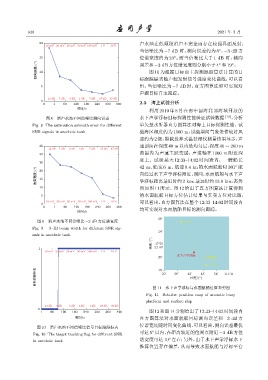
利用 2019 年 8 月在南中国海北部海域开展的
图 8 消声水池不同信噪比测向误差 水下声学浮标目标探测性能验证试验数据 [12] ,分析
Fig. 8 The estimation azimuth error for different 单矢量水听器直方图算法对海上目标探测性能。试
SNR signals in anechoic tank 验海区深度约为1500 m,试验期间气象条件较好风
速约为 2级,船载投弃式温盐深仪测量结果显示,声
35 速剖面在深度40 m以内是均匀层,深度40 ∼ 200 m
-13 dB-7 dB -5 dB 1 dB 7 dB 27 dB 47 dB
范围内为声速主跃变层,声道轴在 1000 m 附近深
30
度上。试验某天 12:33–14:02 时间段内,一艘船长
25 42 m、船宽 6 m、航速 8.4 kn 的水面航船以 301 航
◦
ฉౌࠕए/(°) 20 向经过水下声学浮标附近,期间,水面航船与水下声
15
学浮标距离最近时约2 km,最远时约13.8 km,态势
10 图如图 11 所示。图 12 给出了直方图算法计算得到
5 的水面航船目标方位估计结果与真实方位对比图,
10 mV 20 mV 25 mV 50 mV 100 mV 1 V 10 V 可以看出,直方图算法在整个 12:33–14:02时间段内
0
0 1 60 120 180 240 300 360 均可实现对水面航船目标的测向跟踪。
ᫎ/s
26'
图 9 消声水池不同信噪比 −3 dB 方位谱宽度 14.02
Fig. 9 −3 dB beam width for different SNR sig-
24'
nals in anechoic tank
ጤए/(O) 17ON
1 22.00'
10 mV 20 mV 25 mV 50 mV 100 mV 1 V 10 V
ඵʾܦߦ๏ಖ
20' ඵ᭧ᓈᓕ
12.33
ⴞḷ䐏䑚ḷᘇ 30' 36' 42' ፃए/(O) 48' 54' 111OE
18'
图 11 水下声学浮标与水面航船位置态势图
Fig. 11 Relative position map of acoustic buoy
platform and surface ship
-13 dB -7 dB -5 dB 1 dB 7 dB 27 dB 47 dB
0
1 60 120 180 240 300 360 420 图13和图14分别给出了12:33–14:02时间段内
ᫎ/s 直方图算法对水面航船目标测向误差和 −3 dB 方
位谱宽度随时间变化曲线,可以看出,测向误差最优
图 10 消声水池不同信噪比信号目标跟踪标志
可达5 以内,在距离较近的位置点附近−3 dB方位
◦
Fig. 10 The target tracking flag for different SNR
◦
in anechoic tank 谱宽度可达 10 左右;另外,由于水下声学浮标水下
推算位置存在偏差,从而导致水面航船与浮标平台