
Page 153 - 《应用声学》2021年第2期
P. 153
第 40 卷 第 2 期 王超等: 单矢量水听器直方图测向算法目标探测性能分析 321
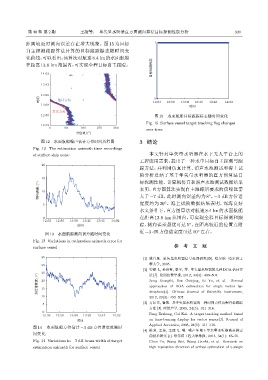
距离较近时测向误差存在增大现象。图 15 为目标 1
自主探测跟踪算法计算的目标跟踪标志随时间变
化曲线,可以看出,该算法对航速8.4 kn的水面航船
ᄬಖᡲᢎಖঃ
在距离13.8 km 范围内,可实现全程目标自主跟踪。
14:02
13:43
13:25
ᫎ ͥᝠவͯ 12:33 12:50 13:08 13:25 13:43 14:02
0
13:08
ᫎ
ᄾࠄவͯ
12:50 图 15 水面航船目标跟踪标志随时间变化
Fig. 15 Surface vessel target tracking flag changes
12:33
0 90 180 270 360
over time
வͯᝈ/(°)
图 12 水面航船噪声估计方位时间历程图 3 结论
Fig. 12 The estimation azimuth time recordings
of surface ship noise 本文针对单矢量水听器在水下无人平台上的
工程应用需求,提出了一种水中目标自主探测与跟
20
踪方法,并利用仿真计算、消声水池测试和海上试
验分析总结了基于单矢量水听器的直方图算法目
15 标探测性能。计算机仿真和消声水池测试数据结果
Քឨࣀ/(°) 10 表明,直方图算法实现自主跟踪所要求的信噪比需
大于 −7 dB,此时测向误差约为 8 ,−3 dB 方位谱
◦
宽度约为 20 。海上试验数据结果表明,深海良好
◦
5
水文条件下,直方图算法对航速 8.4 kn 的水面航船
在距离 13.8 km 范围内,可实现全程目标探测和跟
0
12:33 12:50 13:08 13:25 13:43 14:02
◦
ᫎ 踪,测向误差最优可达 5 ,在距离较近的位置点附
近−3 dB方位谱宽度可达10 左右。
◦
图 13 水面航船测向误差随时间变化
Fig. 13 Variations in estimation azimuth error for
surface vessel 参 考 文 献
35 [1] 姚直象. 单矢量水听器信号处理研究 [D]. 哈尔滨: 哈尔滨工
程大学, 2005.
30
[2] 曾雄飞, 孙贵青, 李宇, 等. 单矢量水听器的几种 DOA 估计方
25 法 [J]. 仪器仪表学报, 2012, 33(3): 499–507.
வͯ៨ࠕए/(°) 20 Zeng Xiongfei, Sun Guiqing, Li Yu, et al. Several
approaches of DOA estimation for single vector hy-
15
10 drophone[J]. Chinese Journal of Scientific Instrument,
2012, 33(3): 499–507.
[3] 方尔正, 崔凯. 基于矢量水听器的一种时间方位历程目标跟踪
5
方法 [J]. 应用声学, 2005, 24(5): 311–316.
0
12:33 12:50 13:08 13:25 13:43 14:02 Fang Erzheng, Cui Kai. A target tracking method based
ᫎ on time-bearing display for vector sensor[J]. Journal of
Applied Acoustics, 2005, 24(5): 311–316.
图 14 水面航船方位估计 −3 dB 方位谱宽度随时
[4] 陈羽, 王伟, 王建飞, 等. 噪声环境下单矢量水听器高分辨定
间变 化
向技术研究 [J]. 哈尔滨工程大学学报, 2013, 34(1): 65–70.
Fig. 14 Variations in −3 dB beam width of target Chen Yu, Wang Wei, Wang Jianfei, et al. Research on
estimation azimuth for surface vessel high resolution direction of arrival estimation of a single