
Page 153 - 《应用声学》2021年第3期
P. 153
第 40 卷 第 3 期 赵佳美等: 应用声信号特征识别车辆车型及车速范围 471
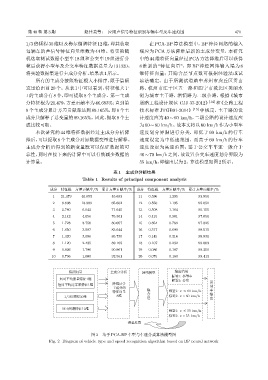
1/3倍频程 30 维以及梅尔倒谱特征 12维,即共获取 在 PCA-BP 算法模型中,BP 神经网络的输入
每辆车的声信号特征向量维数为 44 维。将实验随 端应为 PCA 方法降维后新的主成分变量,本研究
机选取测试数据小型车 18 组和公交车 19 组进行分 中的 44 维特征向量经过 PCA方法降维后可以获得
帧后获得小型车及公交车特征数据总量为 131320。 8 维新的 “特征向量”,即 BP 神经网络输入端为 8
将实验数据集进行主成分分析,结果表1所示。 维特征向量;其隐含层节点数可根据经验法或试
所有的主成分按照特征根大小排序,限于篇幅 凑法确定。由于所测试道路中苏州市虎丘区贡山
这里给出前 20 个。从表 1 中可以看到,特征根大于 路、杭州市江干区五一路和西宁市城北区美丽水
1 的主成分有 8 个,即可提取 8 个主成分。第一主成 街为城市主干路,渚镇路为二级公路,根据《城市
分特征根为 21.479,方差贡献率为 46.693%;直到第 道路工程设计规范 CJJ 37-2012》 [14] 和《公路工程
8 个主成分累计方差贡献率达到 89.165%,即8 个主 技术标准 JTGB01-2014》 [15] 中规定,主干路的设
成分共解释了总变量的 89.165%。因此,提取8个主 计速度应为 40 ∼ 60 km/h,二级公路的设计速度应
成比较可取。 为60 ∼ 80 km/h。故本文将以60 km/h作为小型车
本次研究的 44 维特征数据经过主成分分析降 速度划分界限进行分类,即低于 60 km/h 的行车
维后,可以提取 8 个主成分对原数据变量进行解释。 速度设定为中低速范围,而高于 60 km/h 的行车
主成分分析后得到的新变量既可以保证数据的可 速度设定为高速范围;鉴于公交车车速一般介于
靠性,同时在接下来的计算中可以有效减少数据的 40 ∼ 70 km/h 之间,故设置公交车速度划分界限为
计算量。 55 km/h,即输出层为2。算法模型如图2所示。
表 1 主成分分析结果
Table 1 Results of principal component analysis
成分 特征根 方差贡献率/% 累计方差贡献率/% 成分 特征根 方差贡献率/% 累计方差贡献率/%
1 21.479 46.693 46.693 11 0.596 1.295 93.856
2 8.698 18.909 65.602 12 0.550 1.195 95.051
3 2.780 6.042 71.645 13 0.508 1.104 96.155
4 2.142 4.656 76.301 14 0.415 0.901 97.056
5 1.728 3.756 80.057 15 0.354 0.769 97.825
6 1.650 3.587 83.644 16 0.317 0.690 98.515
7 1.420 3.086 86.730 17 0.145 0.316 98.831
8 1.120 2.435 89.165 18 0.107 0.232 99.063
9 0.826 1.796 90.961 19 0.086 0.187 99.250
10 0.736 1.600 92.561 20 0.075 0.163 99.413
ྲढ़Ք᧚ ˟ੇѬѬౢ Ꭺፏവی ᣥѣፇ౧
ಖኤ1: ࠵یᢼ
ᆁࣱکᑟ᧚ྲढ़1፥ ಖኤ2: Н̔
ᆁࣱکᭆဋྲढ़1፥ ᬌ፥Ցե គ
ѿ
˟ੇѬᄊ
ྲढ़Ք᧚ ᬥ ಖኤ1: x Ĺ 60 km/h ဋ
ե
1/3φᮠሮ30፥ 8፥ ࡏ ಖኤ2: x 60 km/h ᣥ
ѣ
Melψ៨ྲढ़12፥
ಖኤ1: x Ĺ 55 km/h
ಖኤ2: x 55 km/h
ឨࣀԦᯠ
图 2 基于 PCA-BP 车型与车速分类算法模型图
Fig. 2 Diagram of vehicle type and speed recognition algorithm based on BP neural network