
Page 34 - 《应用声学》2021年第5期
P. 34
678 2021 年 9 月
选择 Fisher 比值最大的慢度网格,这样最有可能包 感器和一套降风噪设备,所用数据采集器的采样率
含信号的来波方向就被选定,表示如下: 为 100 Hz,通过无限传输将数据传送到处理中心。
2 设备的布设如图3(c)所示。
N
1 ∑
P s (ω, p) = G(ω, r n ) e −iωp r n , (7)
N 150 100
n=1
90
N 80
1 ∑ 2 70
P t (ω) = |G(ω, r n )| , (8) 100 60
N
n=1 ๒પ/km 50 ͜୧૯ܿ/dB
40
P s (ω, p) 50 30
F(ω, p) = (N − 1), (9) 20
P t (ω) − P s (ω, p) 10
0 0
其中,P s 表示待测信号的功率,而噪声功率由传感 0 50 100 150 200 250 300 350
ᡰሏ/km
器所记录的总体功率P t 减去P s 计算而得。
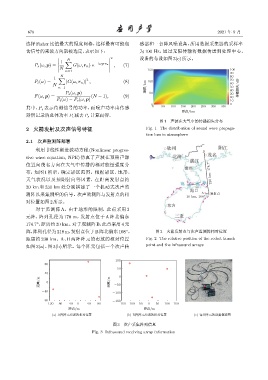
图 1 声波在大气中的传播损失分布
2 火箭发射及次声信号特征 Fig. 1 The distribution of sound wave propaga-
tion loss in atmosphere
2.1 次声监测阵部署
利用非线性渐进波动方程 (Nonlinear progres- B
sive wave equation, NPE) 仿真了声波在预期声源
位置向茂名方向在大气中传播的相对能量强度分
布,如图 1 所示,确定影区范围。根据影区、地形、 230 km, 174.7°
天气状况以及预期射向等因素,在距离发射点约
20 km 和 230 km 处分别搭建了一个机动式次声监
测阵以采集期望的信号。次声监测阵与发射点的相 A ԧ࠱ག
20 km, 108°
对位置如图2所示。
对于监测阵 A,由于地形的限制,此点采用 3
元阵,阵列孔径为 170 m,发射点位于 A 阵北偏东
174.7 ,距离约20 km。对于观测阵B,此点采用4元
◦
阵,阵列孔径为218 m,发射点位于B阵北偏东108 , 图 2 火箭发射点与次声监测阵相对位置
◦
距离约 230 km。A、B 两阵阵元的布放的相对位置 Fig. 2 The relative position of the rocket launch
如图 3(a)、图 3(b) 所示。每个阵元包括一个次声传 point and the infrasound arrays
100
80
50
40 0
ᡰሏ/m 0 ᡰሏ/m -50
-40
-100
-80 -150
-120 -80 -40 0 40 80 -150 -100 -50 0 50 100 150
ᡰሏ/m ᡰሏ/m
(a) AЋ࣋ஊᄊᄱࠫͯᎶ (b) BЋ࣋ஊᄊᄱࠫͯᎶ (c) ඈ˔Ћᄊܬୌஊڏ
图 3 次声采集阵列信息
Fig. 3 Infrasound receiving array information