
Page 13 - 《应用声学》2022年第1期
P. 13
第 41 卷 第 1 期 邵祚桪等: 基于遗传算法的传声器阵列位置有源校正研究 9
控制采集板。校正声源为惠威 H4 扬声器播放的鸣 实验步骤如下:
笛声,信号源与图 3 所示相同。阵列中心位置 (2 m, (1) 建立空间直角坐标系,确定坐标轴方向,设
4 m, 1.33 m),校正源位置(2 m, 4 m, 1.12 m),(3 m, 置3个声源,准确测量声源位置;
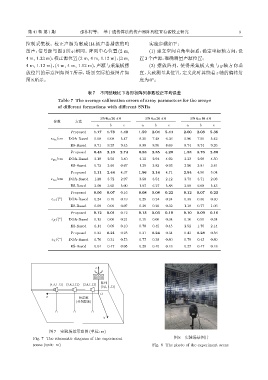
4 m, 1.12 m),(4 m, 4 m, 1.12 m),声源与采集板摆 (2) 摆放阵列,使得采集板大致与 y 轴方向垂
放位置的示意图如图 7 所示,场景实际拍摄图片如 直,大致测量其位置,定义此时其绕着z 轴的偏转角
图8所示。 度为0 ;
◦
表 7 不同信噪比下各形状阵列参数校正平均误差
Table 7 The average calibration errors of array parameters for the arrays
of different formations with different SNRs
SNR=30 dB SNR=20 dB SNR=10 dB
参数 方法
a b c a b c a b c
Proposed 1.17 1.78 4.40 1.59 2.04 5.44 2.00 2.08 5.36
/cm
ε x 0 DOA-Based 5.60 6.08 5.47 6.25 7.48 6.36 5.96 7.50 5.42
ES-Based 8.71 9.23 9.45 8.98 8.95 8.69 8.74 8.74 9.26
Proposed 0.43 2.16 2.74 0.58 2.35 4.29 1.53 3.76 2.80
/cm DOA-Based 3.18 2.59 3.40 4.12 2.94 4.92 3.33 2.98 4.50
ε y 0
ES-Based 0.73 3.69 0.67 1.29 3.83 0.93 2.56 3.81 3.81
Proposed 1.11 2.44 4.37 1.56 3.14 4.71 2.54 4.90 5.04
/cm
ε z 0 DOA-Based 1.20 3.72 2.97 3.50 3.54 2.12 3.73 3.71 2.03
ES-Based 2.60 3.65 5.00 1.97 6.27 5.88 2.68 6.68 5.43
Proposed 0.06 0.07 0.16 0.08 0.08 0.22 0.12 0.07 0.23
ε α/( ) DOA-Based 0.24 0.19 0.19 0.29 0.24 0.24 0.30 0.30 0.30
◦
ES-Based 0.09 0.09 0.07 0.39 0.29 0.32 1.18 0.77 1.06
Proposed 0.12 0.01 0.12 0.13 0.03 0.10 0.10 0.09 0.16
ε β /( ) DOA-Based 0.13 0.06 0.21 0.15 0.06 0.34 0.16 0.50 0.34
◦
ES-Based 0.14 0.09 0.10 0.70 0.45 0.45 2.52 1.70 2.14
Proposed 0.23 0.21 0.25 0.31 0.24 0.34 0.43 0.28 0.56
ε γ /( ) DOA-Based 0.76 0.31 0.75 0.77 0.38 0.80 0.79 0.43 0.80
◦
ES-Based 0.04 0.47 0.05 0.20 0.45 0.18 0.27 0.47 0.18
z
ѵ
↼֒֒⊲↽ ↼֒֒⊲↽ ↼֒֒⊲↽
↼֒֒ ⊲↽
O
x ಣູ
(Ѭѿୌஊ)
y
图 7 实验场景示意图 (单位:m)
Fig. 7 The schematic diagram of the experiment 图 8 实验场景图片
scene (unit: m) Fig. 8 The photo of the experiment scene