
Page 20 - 《应用声学》2022年第1期
P. 20
16 2022 年 1 月
2
水平的转角) 处选择正则化参数。以 λ 为参数的 L 庞大,在制作、运输和使用等方面都有很大困难。本
曲线的曲率函数可以表示为 文采用了一种分布式的开放球形阵列,子阵孔径较
′ ′′ ′′ ′ 小适用于中高频范围,外部整体阵列孔径较大可以
|u v − u v |
2
k(λ ) = , (18)
′ 2 ′ 2 3/2
|(u ) + (v ) | 扩大频率范围到低频。具体的布放方案为:为实现
其中,u(λ ) = lg ∥p − Aq∥,v(λ ) = lg ∥q∥,且 “ ”, 多声源声成像的目的,选取截断阶数P 为4。传声器
2
2
′
“ ”表示对λ 求解一阶导数和二阶导数。 的分布方案要求符合奈奎斯特采样定理的空间球
2
′′
2
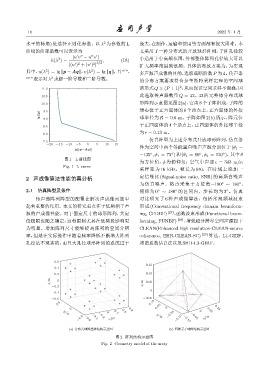
11.0 谐形式Q > (P + 1) ,从而保证空间采样不混叠,因
10.5 此选取传声器数量 Q = 32。32 阵元整体分布式球
形阵列示意图见图 2(a),它由 8 个子阵组成,子阵的
10.0
lg||q|| 9.5 球心位于正六面体的 8 个顶点上,正六面体的外接
球半径为 R = 0.6 m。子阵如图 2(b) 所示,阵元位
9.0
于正四面体的 4 个顶点上,正四面体的外接球半径
8.5
为r = 0.13 m。
8.0
仿真阵型为上述分布式开放球形阵列,仿真条
7.5
-20 -15 -10 -5 0 5 10 15
件为空间中两个等能量白噪声声源分别位于 (θ 1 =
lg||p֓Aq||
−135 , ϕ 1 = 75 ) 和 (θ 2 = 60 , ϕ 2 = 120 ),其中 θ
◦
◦
◦
◦
图 1 L 曲线图
为方位角,ϕ 为俯仰角;空气中声速 c = 343 m/s,
Fig. 1 L–curve
采样率为 16 kHz,帧长为 640,在时域上添加一
2 声成像算法性能仿真分析 定信噪比 (Signal-noise ratio, SNR) 的高斯白噪声
为仿真噪声。格点采集于方位角 −180 ∼ 180 、
◦
◦
2.1 仿真阵型及条件 俯仰角 0 ∼ 180 的区间内,步长均为 3 。仿真
◦
◦
◦
传声器阵列阵型的配置在解决声成像问题中 对比研究了 6 种声成像算法,包括常规频域波束
起着重要的作用。本文的研究重点在于低频相干声 形成 (Conventional frequency domain beamform-
源的声成像性能。对于固定尺寸的球形阵列,其定 ing, CFDBF) [27] 、函数波束形成(Functional beam-
位极限也随之确定,这种限制尤其在低频段影响更 forming, FUNBF) [28] 、增强超分辨率空间声源相干
为明显。增加阵列尺寸能够提高阵列的空间分辨 CLEAN(Enhanced high resolution-CLEAN-source
率,但是在实际操作中随着频率降低不断增大阵列 coherence, EHR-CLEAN-SC) [29] 算法、L1-GIBF、
孔径是不现实的,而且大孔径球形阵列的系统过于 球谐系数估计法以及SHD-L2-GIBF。
0.6
0.15
0.4
0.2 0.10
z/m 0 z/m 0.05
-0.2
0
-0.4
-0.6 -0.05
0.5 0.10
0 0.6 0.05 0 0.05 0.10
0 0.2 0.4 -0.05 0
y/m
-0.5 -0.6 -0.4 -0.2 x/m y/m -0.10 -0.10 -0.05 x/m
(a) Ѭ࣋रုடʹፇᇨਓڏ (b) پЋߕုፇᇨਓڏ
图 2 阵列结构示意图
Fig. 2 Geometry model of the array