
Page 41 - 《应该声学》2022年第2期
P. 41
第 41 卷 第 2 期 张芮宁等: 城市社区公园声景分布与景观特征关联性研究 209
᱕ڇᇫӝ
Ӓ᫃(К) ӡ̋ጤ(ԥՔԥᢼ᥋)
ڱ1
⍱ࣞᒵ൰॰
ܸ᭧ሥࣹڤ
ᣗܳᄊүগำү
ᣗܳᄊ᭢গำү ᱕ڇྭˊ࠵ӝ
̈
ᬷ
ڱ4 ᛤ (
Շ䰨⑮॰ ӭ
ᣗܳᕙ༟లᄦ ԥ Ք
ᤠ˗ᄊүগำү ᢼ
ᣗ࠶ᄊ᭢গำү ᥋ )
᱕ڇᇫӝ ڱ3 ڱ5
Ӱᐛ≪㌱॰ ኧ։Շ䰨॰
ܸ᭧ሥඵ᭧ ᣗܳᕙ༟లᄦ
ᣗ࠶ᄊүগำү ᤠ˗ᄊүগำү
ᣗ࠶ᄊ᭢গำү ᣗ࠶ᄊ᭢গำү
ڱ6
ޛਙᒵ൰॰ ڱ7 Ꮖᔊ࠵ӝ
ڱ2 ܸ᭧ሥࣹڤ ᷍с⍱ࣞ॰
ڛ䓡ᒵ൰॰ ᣗܳᄊүগำү/ᣗ࠶ᄊ᭢গำү ܸ᧚˰లᄦ
ܳϤᢶ٨ెὙ ᣗ࠶ᄊүগำү
ᣗܳᄊүগำү ᤠ˗ᄊ᭢গำү
ᤠ˗ᄊ᭢গำү ӯ᫃(˟К)
N
0 8M 32M
᜵ໝෲ(ԥՔپᢼ᥋)
2M 16M
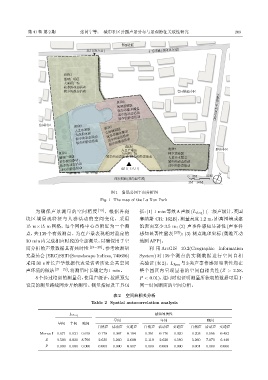
图 1 鲁迅公园平面分析图
Fig. 1 The map of the Lu Xun Park
为确保声景测量的空间精度 [19] ,根据各斑 括:(1) 1 min等效A声级(L Aeq ) (二级声级计,英国
块区域景观特征与人群活动的空间变化,采用 赛纳斯 CR: 162B),测量高度 1.2 m,距离围墙或建
15 m×15 m 网格,每个网格中心点附近为一个测 筑表面至少 3.5 m;(2) 声事件感知显著性 (声事件
点,共 139 个有效测点。为在声景表现相对稳定的 感知显著性量表 [23] );(3) 测点地理坐标 (奥维互动
30 min 内完成相应时段的全部测量,以确保用于空 地图APP)。
间分析的声景数据具有共时性 [19−20] ,参考欧洲研 利 用 ArcGIS 10.2(Geographic Information
究委员会(ERC)SSID(Soundscape Indices, 740696) System) 对 139 个测点的实测数据进行空间自相
采用 30 s 时长声学数据代表受访者所处公共空间 关验证 (表 2)。L Aeq 与 3 类声事件感知显著性均在
声环境的做法 [21−22] ,将测量时长确定为1 min。 整个园区内呈现显著的空间自相关性 (Z > 2.58,
8 个经过培训的测量员,使用声级计,按照预先 P < 0.01),这同时也证明测量所获取的数据可用于
设定的测量路线同步开始测量。测量指标及工具包 同一时间断面的空间分析。
表 2 空间自相关分析
Table 2 Spatial autocorrelation analysis
感知显著性
L Aeq
早间 午间 晚间
早间 午间 晚间
自然声 活动声 交通声 自然声 活动声 交通声 自然声 活动声 交通声
Moran I 0.671 0.621 0.619 0.178 0.367 0.184 0.351 0.170 0.320 0.203 0.555 0.452
Z 9.500 8.830 8.790 2.630 5.260 2.680 5.110 2.620 4.580 3.260 7.870 6.440
P 0.000 0.000 0.000 0.008 0.000 0.007 0.000 0.009 0.000 0.001 0.000 0.000