
Page 132 - 《应用声学》2022年第4期
P. 132
630 2022 年 7 月
声压级校准处理,并验证算法在不同噪声干扰情况
2 目标声源声压级校准实验 下的性能。
由于户外监测的目标声源通常是稳态声源,而
2.1 相关参数及实验平台
干扰声源为非稳态的环境噪声,干扰声源通常具
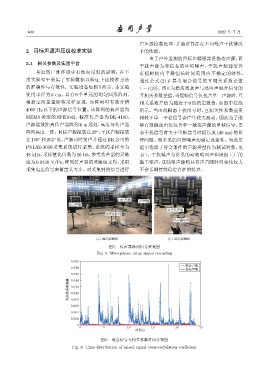
考虑到户外环境中有地面反射的影响,在半 有短时间内平稳但长时间范围内不稳定的特性。
消实验室中采集了实验数据以验证上述校准方法 通过公式 (2) 计算出混合信号的互相关系数差值
的准确性与有效性。实验设备如图 5 所示,本实验 1 − r(Ω)。图 6 为稳态流水声与鸡叫声混合信号的
使用半径为 6 cm,具有 9 个单元的均匀圆形阵列。 互相关系数差值,当短帧信号仅包含单一声源时,互
根据空间奈奎斯特采样定理,该阵列可有效分辨 相关系数差值为趋近于 0 的稳定数值,如图中红线
4000 Hz 以下的声源信号位置。该阵列的传声器为 所示。当出现瞬态干扰信号时,互相关性系数差值
MEMS 类型的 SPH1642,标准传声器为 BK-4189。 相较于单一平稳信号会产生较大波动。因此为了能
声源摆放距离传声器阵列 4 m 远处,高度与传声器 够有效挑选出仅包含单一稳态声源的单帧信号,要
阵列高度一致。目标声源摆放在29 ,干扰声源摆放 求干扰信号有大于单帧信号时间长度 (40 ms) 的暂
◦
在100 和252 处,声源同时发声并通过 BK公司的 停间隙。而常见的自然噪声均满足此条件。为此实
◦
◦
PULSE-3050 采集系统进行采集,系统的采样率为 验中选取了符合条件的声源类型作为测试对象,见
48 kHz,采样量化位数为16 bit,参考传声器的灵敏 表 1。干扰噪声为常见的动物鸣叫声和周围工厂的
度为 0.0498 V/Pa,阵列传声器的灵敏度未知,采用 施工噪声,这些噪声源均具有声音随时间变化较大
采集电压信号来衡量其大小。对采集到的信号进行 不会长期持续稳定存在的特点。
100Oܦູ 29Oܦູ
252Oܦູ
ԠᏦ͜ܦ٨
͜ܦ٨ѵ
͜ܦ٨ѵ
(a) ᤊఀࠄྭڏ (b) ᤃఀࠄྭڏ
图 5 传声器阵列信号采集图
Fig. 5 Microphone array signal recording
0.020
ຉՌܦູ
0.018 ᄬಖܦູ
0.016
ᄱТভጇࣀϙ 0.012
0.014
0.010
0.008
0.006
0.004
0.002
0
0 5 10 15 20 25
ᰦ䰤/s
图 6 混合信号互相关系数时间分布图
Fig. 6 Time distribution of mixed signal cross-correlation coefficient