
Page 178 - 《应用声学》2022年第4期
P. 178
676 2022 年 7 月
Z
ᢼ݀வՔ
Y
Mic
2
X
1. Կ෴ኸ͜ਖ٨
1
2. ࢻ෴ኸ͜ਖ٨
(a) ෴ኸܧʹү͜ਖ٨࣋Ꮆ (b) ᢼЯՑଆ͜ܦ٨࣋Ꮆ
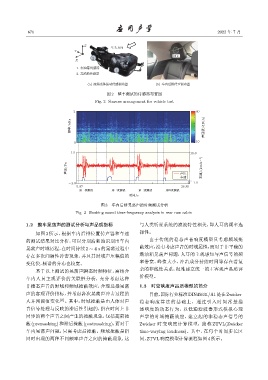
图 2 整车测试的传感器布置图
Fig. 2 Sensors arrangement for vehicle test
2 60
ᮠဋ/kHz ܦԍጟ/dB(A)
10
0
1.5 10.0
ܦԍ/Pa ᢼᤴ/(kmSh -1 )
ܦԍ
ᢼᤴ
-2.0 00 -1.0
5.97 26.85
ኄʷត ኄ̄ត ኄʼត ኄپត
ᫎ/s
图 3 车内后排晃荡声的时频测试分析
Fig. 3 Sloshing sound time-frequency analysis in rear row cabin
1.2 整车晃荡声的测试分析与声品质指标 与人类听觉系统的滤波特性相关,即人耳的频率选
如图 3 所示,根据车内后排位置传声器和车速 择性。
的测试结果对比分析,可以分别清晰地识别出车内 由于传统的稳态声音响度模型只考虑频域掩
晃荡声时域历程,在时间持续2 ∼ 4 s 的晃荡过程中 蔽效应,没有考虑声音的时域属性,而对于非平稳的
存在多次间隔性冲击现象,并且其时域声压幅值的 燃油箱晃荡声问题,人耳的主观感知与声信号的频
变化快,频谱的分布也较宽。 率带宽、峰值大小、冲击成分持续时间等存在着复
杂的非线性关系,很难建立统一的主客观声品质评
基于以上测试的晃荡声瞬态时频特征,需结合
价模型。
车内人员主观评价的关联性分析,充分考虑这种
非稳态声音的时域和频域掩蔽效应,合理选择晃荡 1.3 时变响度声品质模型的简介
声的客观评价指标,并考虑各次晃荡声冲击过程的 目前,国际行业标准DIN45631/A1是在Zwicker
人耳闻阈值变化 [6] 。其中,时域掩蔽是由人体对声 稳态响度算法的基础上,通过引入时间常量描
音信号处理与反映的滞后性引起的,指在时间上非 述响度的动态行为,以低通滤波器形式模拟心理
同步的两个声音之间产生的掩蔽现象,包括超前掩 声学的时域掩蔽效应,建立起的非稳态声信号的
蔽(premasking)和滞后掩蔽(postmasking),而对于 Zwicker 时变响度计算模型,简称 ZTVL(Zwicker
车内晃荡声问题,只需考虑后掩蔽。频域掩蔽是指 time-varying loudness)。其中,在每个时间步长区
同时出现的两种不同频率声音之间的掩蔽现象,这 间,ZTVL响度模型计算流程如图4所示。